Standards, Interoperability, and Governance in Edge Infrastructure
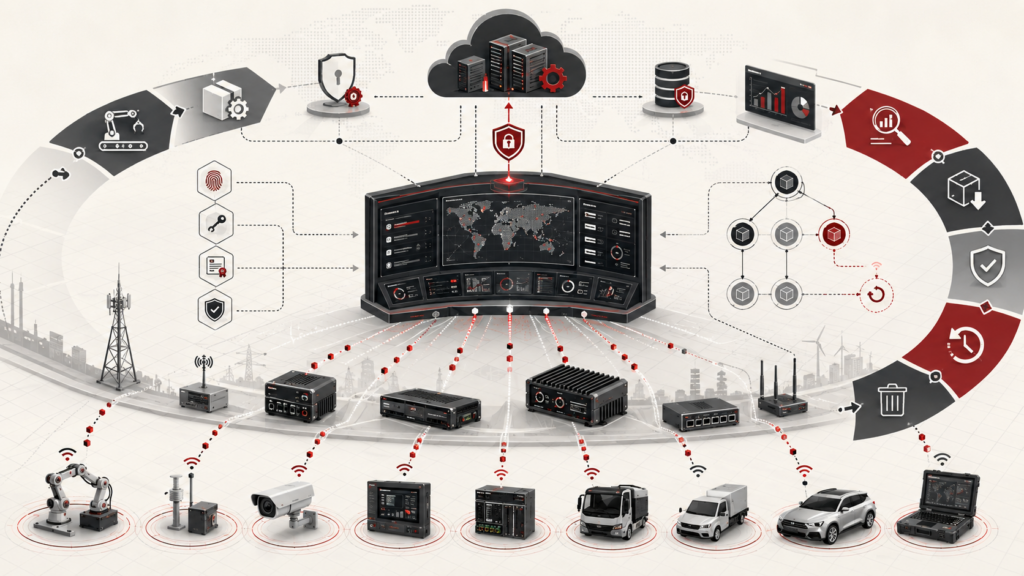
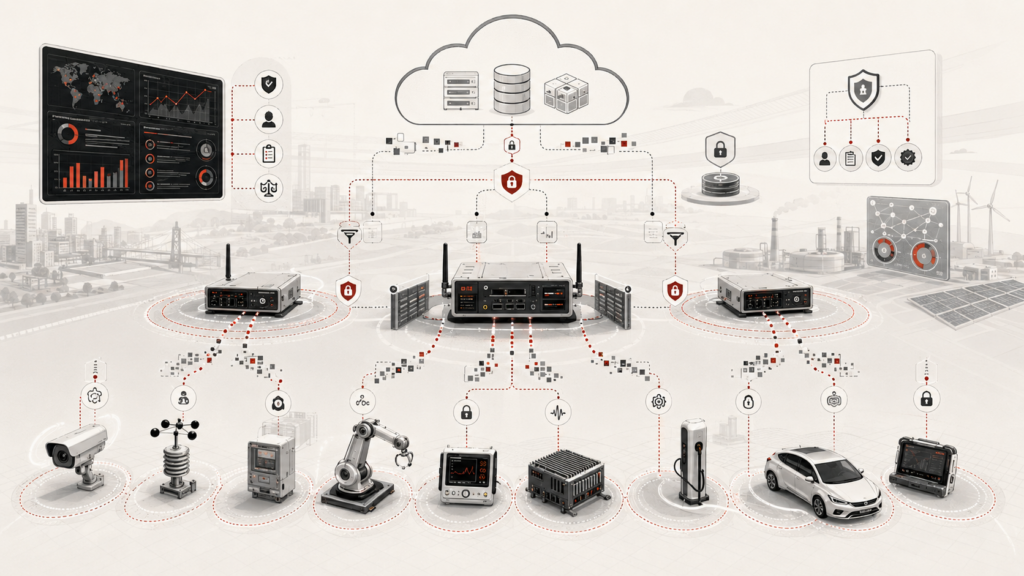
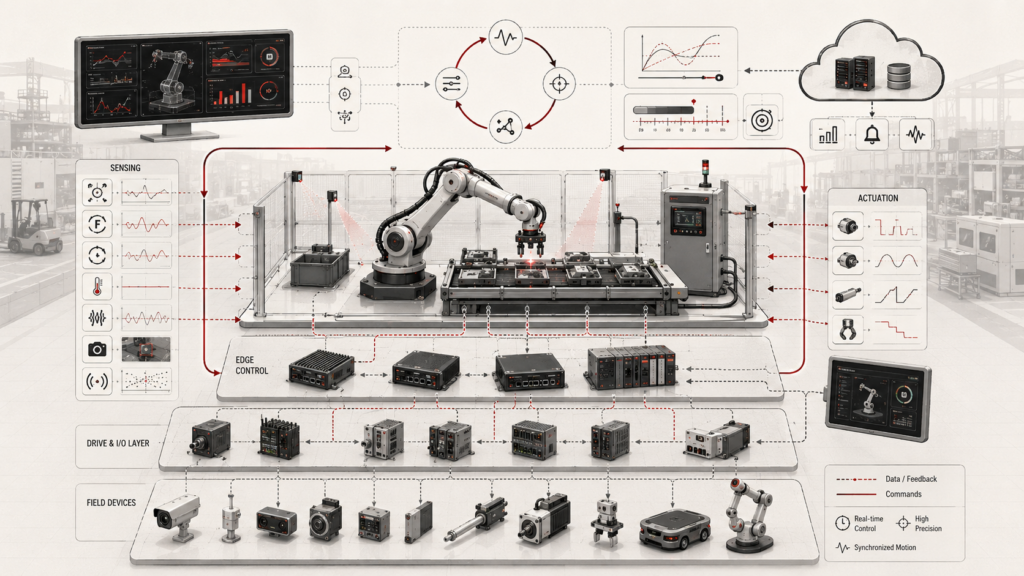
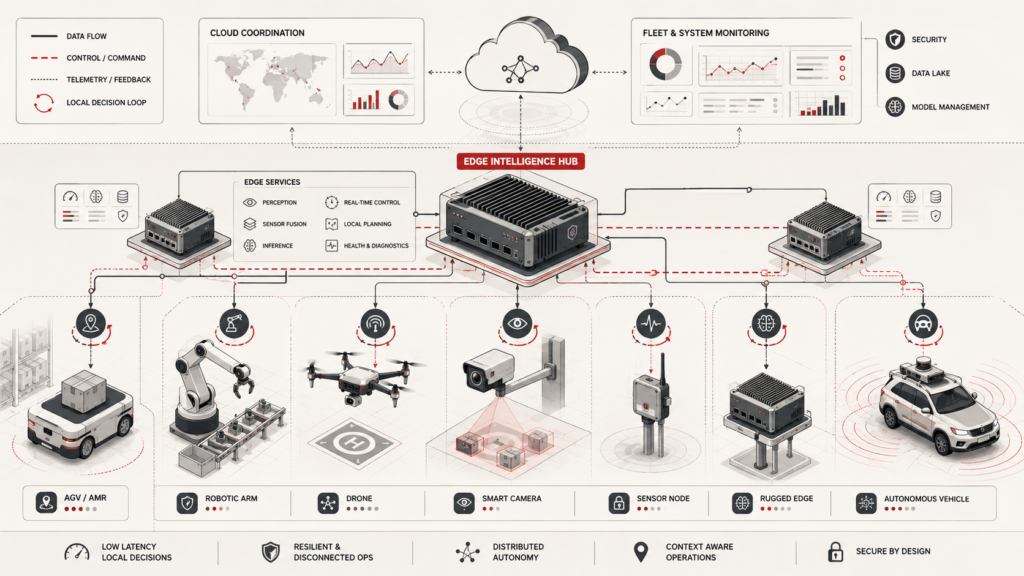
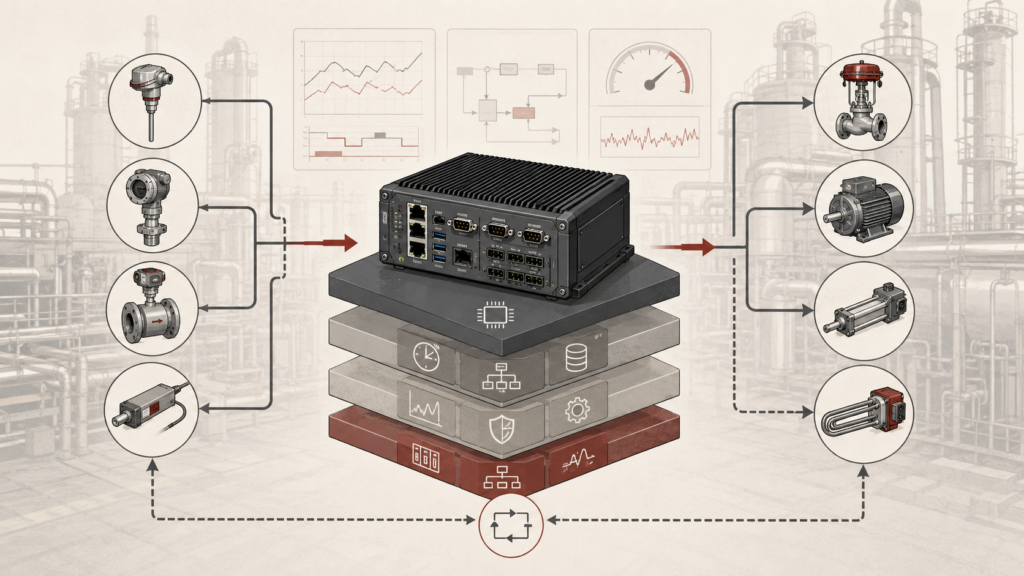
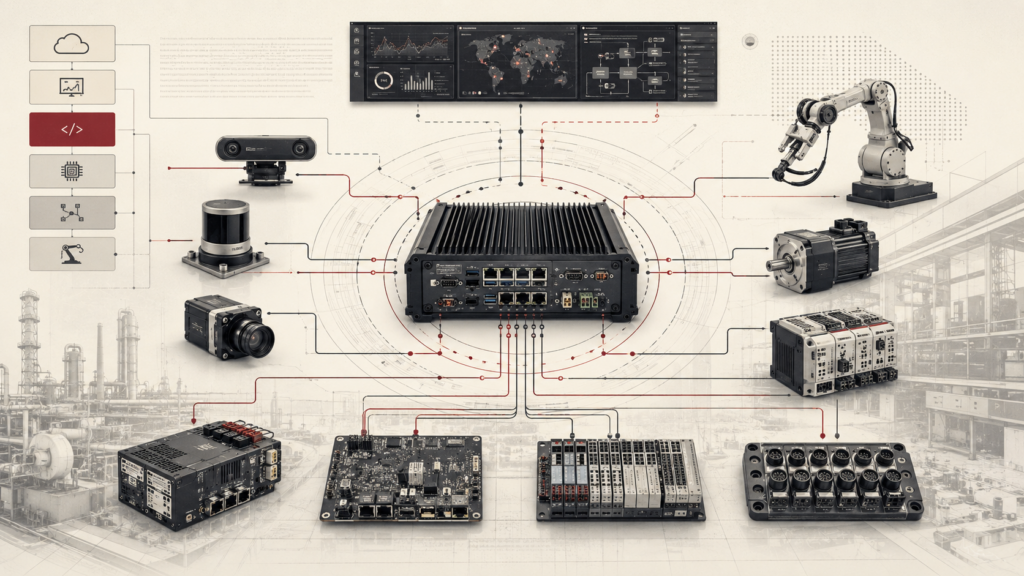
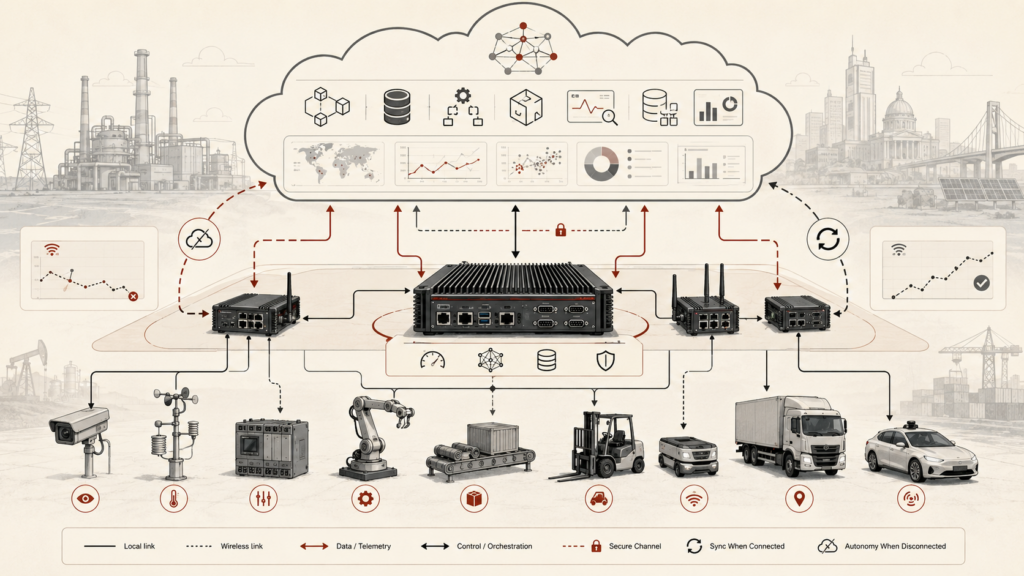
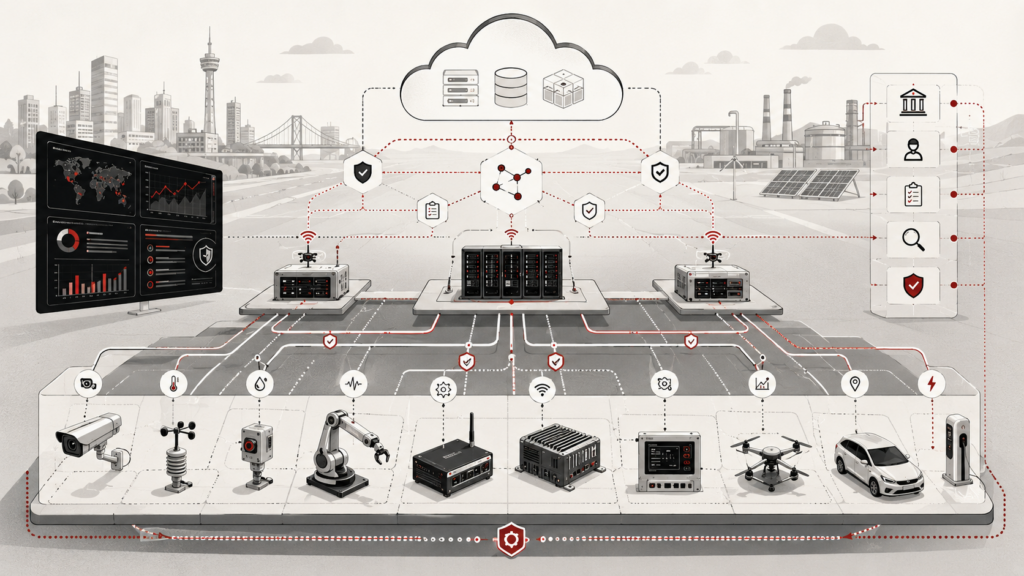
Standards, interoperability, and governance in edge infrastructure determine whether heterogeneous devices, gateways, APIs, data models, runtimes, and control planes can operate as a coherent distributed system. Edge environments rarely remain uniform; they combine vendors, protocols, networks, device generations, and management platforms across long operational lifecycles. Standards help define shared expectations, but interoperability only becomes durable when systems preserve meaning across interfaces, data flows, security baselines, and lifecycle transitions. Governance turns those technical relationships into accountable practice by defining versioning rules, support boundaries, decision rights, security expectations, and responsibilities for change. In embedded and edge systems, infrastructure becomes dependable not simply when components connect, but when they remain understandable, portable, secure, supportable, and governable as the system evolves.