
Last Updated May 12, 2026
Embedded control systems examine how sensing, computation, timing, estimation, decision logic, and actuation are organized to regulate physical behavior in real time. At a technical level, embedded control is not simply software issuing commands to hardware. It is the engineering of closed-loop cyber-physical regulation, where measurements, state estimates, control laws, schedulers, timers, buses, actuators, safety constraints, supervisory states, and physical dynamics must work together under real limits of latency, jitter, quantization, saturation, disturbance, and failure.
Control is one of the most consequential functions an embedded system can perform because it closes the loop between observation and physical consequence. A controller senses some part of the world, estimates or interprets the current state, computes an action, applies that action through an actuator or control interface, and then observes the result. If sensing is noisy, timing is late, the plant model is wrong, or the actuator cannot realize the command, the overall system behavior may degrade even when the software appears logically correct.
The deeper architectural question is therefore not only how to compute a control law, but how to make that control law executable in a real embedded environment. A strong embedded control system aligns hardware integration, measurement quality, timing budgets, scheduler discipline, estimator behavior, actuator limits, safety interlocks, supervisory modes, and feedback-loop monitoring closely enough that physical regulation remains stable, bounded, observable, and recoverable in operation.
Main Library
Publications
Article Map
Embedded & Edge Systems
Related Topic
Cyber-Physical Systems
Related Topic
Robotics & Feedback
Related Topic
Autonomous Edge Systems
For engineers, embedded control should be understood as a full-stack cyber-physical problem. The controller is not just an algorithm. It is a timed computation embedded in hardware, connected to noisy sensors, executed by schedulers, constrained by buses and timers, translated through drivers, realized by actuators, and judged by the behavior of a physical process. Control becomes trustworthy only when the entire loop — from measurement to actuation — is engineered as one coherent system.
Engineering Problem
The engineering problem is how to make embedded computation regulate a physical process reliably under uncertainty, delay, disturbance, and hardware constraint. A control loop must sense the process, estimate relevant state, compute a command, apply that command through an actuator or interface, and observe the physical consequence. Every stage can degrade the loop: sensors can drift, ADCs can saturate, timers can jitter, interrupts can preempt control tasks, buses can delay messages, actuators can saturate, and physical dynamics can differ from the model used by the controller.
In ordinary software, a late result may be inefficient or incorrect. In embedded control, a late command can be physically wrong. A measurement that is accurate but stale may cause the controller to regulate a state that no longer exists. A command that is mathematically valid may be impossible for the actuator to realize. A control loop that is stable in simulation may become unstable when sampling, quantization, friction, backlash, sensor delay, or scheduling jitter are included.
Production embedded control therefore requires more than implementing PID or threshold logic. Engineers need a model of the plant, measurement chain, control period, timing tolerance, actuator authority, safety bounds, fallback states, and observability signals. The control law must be embedded inside a real system that can detect when its assumptions are weakening.
The practical question is not only “does the control algorithm work?” It is “does the whole loop remain timely, observable, physically feasible, safe, and recoverable under deployed conditions?”
Reference Architecture
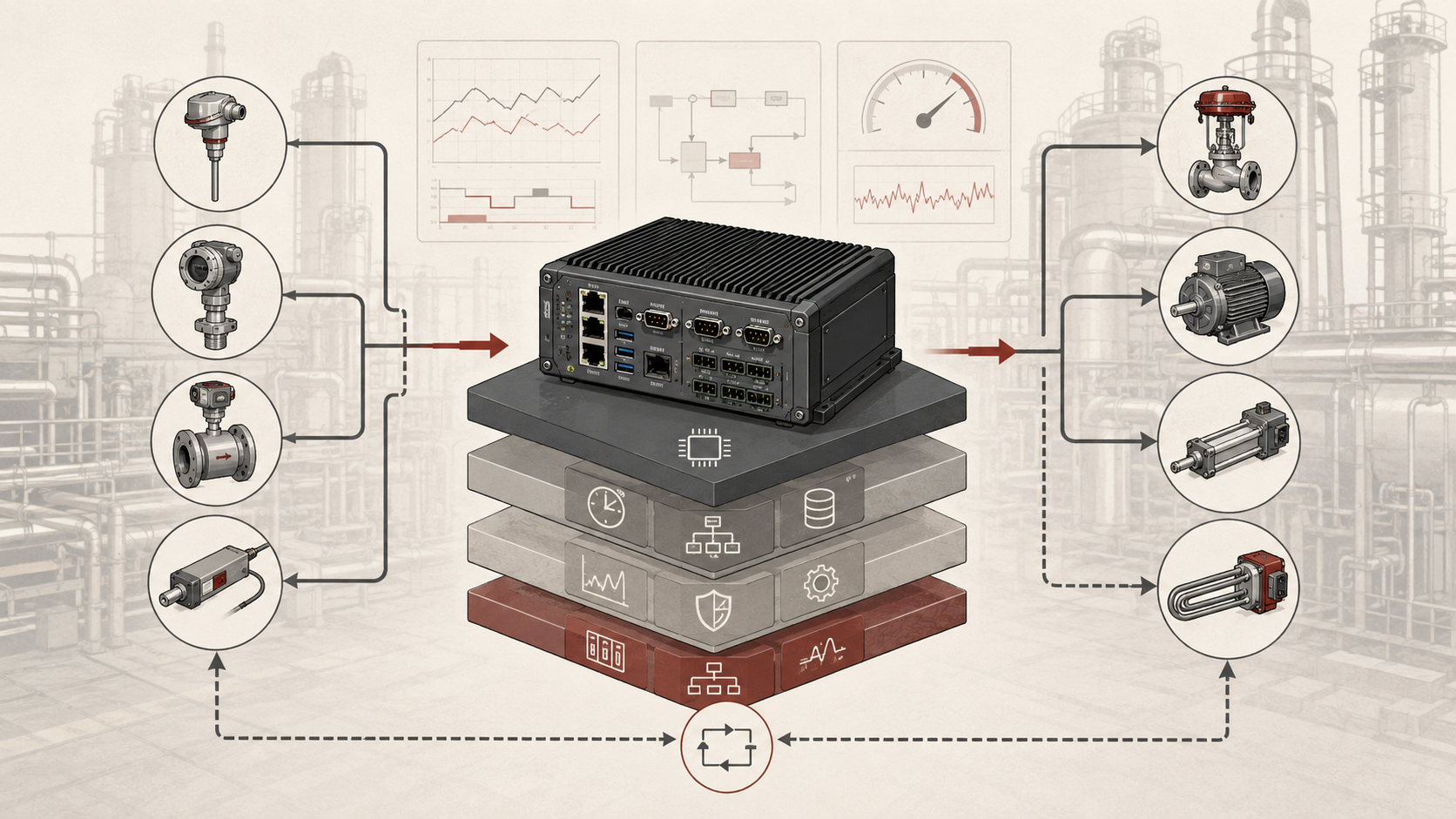
A practical embedded control architecture can be understood as a layered closed loop. The specific system may be a motor drive, HVAC controller, robotic joint, medical device, industrial process controller, power converter, autonomous platform, or environmental regulation node, but the engineering structure is broadly consistent.
| Layer | Engineering Role | Control Concern | Evidence Artifact |
|---|---|---|---|
| Plant or physical process | The physical system being regulated | Dynamics, disturbance, delay, nonlinear behavior, saturation, uncertainty | Plant model, operating envelope, disturbance assumptions |
| Sensor and measurement layer | Measures process variables or proxy signals | Noise, drift, calibration, aliasing, timestamping, missing data | Sensor profile, calibration record, sampling policy |
| Data acquisition layer | Converts physical signals into digital values | ADC resolution, conversion latency, filtering, quantization, scaling | DAQ profile, signal-chain manifest, unit map |
| Estimator and filtering layer | Transforms measurements into operational state | State estimation, observability, residuals, confidence, stale measurements | Estimator configuration, filter parameters, residual log |
| Control law layer | Computes nominal control command | Stability, tracking, disturbance rejection, gain tuning, robustness | Controller config, gains, model assumptions, test results |
| Safety filter layer | Constrains candidate commands before actuation | Command bounds, safe set, actuator constraints, thermal and current limits | Safety-envelope policy, command-filter log, reason codes |
| Supervisory logic layer | Constrains, suspends, or overrides nominal control | Startup, shutdown, mode switching, interlocks, fault states | State-machine manifest, safety policy, mode-transition log |
| Runtime and scheduling layer | Executes control tasks within timing constraints | Control period, jitter, deadline misses, priority inversion, watchdogs | Timing budget, scheduler profile, watchdog records |
| Actuation and driver layer | Realizes command as voltage, current, torque, motion, flow, heat, or switching | Saturation, slew limits, dead zones, thermal limits, power limits, driver faults | Actuator profile, driver config, command log |
| Monitoring and recovery layer | Observes loop performance and triggers safe behavior | Error growth, saturation rate, fault containment, safe fallback, recovery | Control-loop log, fault log, recovery record |
This architecture makes embedded control inspectable. It separates the plant, measurement chain, state estimate, nominal command, safety-filtered command, supervisory mode, scheduler, and actuator realization. That separation matters because failures often occur at the boundaries: a measurement is stale, a state estimate is overconfident, a command is saturated, a safety filter is bypassed, or a scheduler misses the deadline assumed by the control design.
Implementation Pattern
A rigorous embedded control implementation begins by defining the loop explicitly. Engineers should specify what is controlled, what is measured, what is estimated, what the controller commands, how often the loop runs, what timing variation is acceptable, what the actuator can physically realize, and what safe behavior occurs when assumptions fail.
A strong implementation should include:
| Artifact | Purpose | Typical Format |
|---|---|---|
| Plant model | Represents controlled process dynamics, inputs, outputs, disturbances, and constraints | Python model, C model, Simulink-style model, YAML/JSON metadata |
| Control-loop specification | Defines controlled variable, measured variable, control period, deadline, jitter tolerance | YAML, JSON, Markdown design record |
| Sensor calibration record | Defines units, offsets, scale factors, noise assumptions, calibration date, measurement validity | CSV, JSON, SQL table |
| Estimator configuration | Defines filtered variables, state vector, filter gains, residual thresholds, freshness limits | YAML or JSON |
| Controller configuration | Defines PID gains, state-feedback gains, sampling period, anti-windup behavior, saturation limits | YAML, JSON, firmware constants |
| Safety-filter configuration | Defines command clipping, slew-rate limits, safe-set rules, thermal limits, interlocks, and reason codes | YAML, JSON, Rust/C validation logic |
| Supervisory state machine | Defines startup, nominal control, warning, degraded mode, safe stop, fault, and recovery transitions | YAML, C/C++, Rust, statechart |
| Actuator profile | Defines command range, torque/current/power/thermal limits, slew rate, dead zone, saturation behavior | YAML, JSON, datasheet-derived table |
| Safety envelope | Defines allowed state region, command limits, fault thresholds, interlocks, and fallback behavior | YAML, policy-as-code, safety case |
| Control-loop log | Records setpoint, measurement, estimate, error, candidate command, filtered command, saturation, latency, jitter, and state | CSV, SQL, binary log, telemetry stream |
| Validation suite | Tests stability, tracking, timing, saturation, sensor fault, actuator fault, and safe-state transition | Python, pytest, Bash, hardware-in-the-loop scripts |
The implementation goal is to make closed-loop behavior testable. A controller should not merely appear to regulate a process in one demonstration. Engineers should be able to inspect loop timing, measurement quality, state-estimation residuals, command saturation, watchdog events, fallback transitions, and recovery behavior across realistic operating conditions.
Formal Model: Plant, Controller, State, Output, and Command
A technical embedded control architecture begins with a model of the physical process and the controller. At a high level, a plant can be represented by a state, an input, an output, and dynamics that describe how state evolves over time.
x_{k+1} = f(x_k, u_k, w_k)
\]
Interpretation: \(x_k\) is the physical state of the controlled process, \(u_k\) is the control input, and \(w_k\) represents disturbance or model uncertainty. The function \(f\) describes how the plant evolves after the controller acts.
y_k = h(x_k, v_k)
\]
Interpretation: \(y_k\) is the measured output, and \(v_k\) represents sensor noise or measurement error. The controller usually acts on measurements or estimates rather than perfect knowledge of the physical state.
In many embedded systems, this model is simplified into a linear discrete-time representation around an operating region:
x_{k+1} = Ax_k + Bu_k + w_k
\]
Interpretation: \(A\) represents the plant dynamics, \(B\) maps control input into state change, and \(w_k\) captures disturbance or unmodeled effects. Even when the real system is nonlinear, this form is useful for simulation, analysis, and controller design around a particular operating point.
y_k = Cx_k + v_k
\]
Interpretation: \(C\) maps state into measured output, while \(v_k\) represents sensor noise. If \(C\) does not expose enough information about the state, the controller may be trying to regulate variables it cannot observe well enough.
This formal structure is useful because it separates physical state, measured output, estimated state, candidate command, filtered command, and realized actuation. Embedded control fails when those distinctions are blurred: raw measurement is treated as truth, estimated state is treated as perfectly fresh, or actuator commands are assumed to become physical behavior without delay, saturation, safety filtering, or disturbance.
What Are Embedded Control Systems?
Embedded control systems are systems in which an embedded computing platform regulates or influences a physical process through repeated cycles of sensing, computation, and actuation. What distinguishes them from more general embedded devices is that the system’s meaning and correctness depend on closed-loop interaction with the world.
In a loosely interactive embedded system, software may log data, display information, or communicate status. In a control-oriented embedded system, software participates directly in shaping behavior. The processor becomes part of a loop that must remain timely, stable, and physically meaningful. Embedded control is therefore not simply software that happens to run on a device. It is software operating under the constraints of the physical process it is meant to regulate.
This is why the cyber-physical systems perspective is so important. Embedded control depends on time, concurrency, physical dynamics, measurement integrity, hardware interfaces, and feedback. A loop that is internally correct as software can still be physically wrong if it violates the timing, sensing, or actuation assumptions of the controlled system.
For engineers, the practical definition is this: an embedded control system is trustworthy only when its entire sensing-computation-actuation loop remains stable, timely, bounded, observable, and safe across realistic operating conditions.
The Closed Loop: Sensing, Computation, and Actuation
The most basic structure of embedded control is the closed loop. Sensors observe part of the physical process. Software interprets those observations, perhaps through estimation or filtering, then computes a control action. Actuators, drives, or other interfaces apply that action to the plant or process. The system then senses the consequences and repeats.
This structure may sound simple, but every part of it can fail or distort meaning if timing, measurement, or hardware behavior are weak. The loop is not merely a flowchart. It is a coupled dynamical system. The process evolves while the controller is sampling, computing, waiting for bus access, issuing commands, and receiving new measurements.
Strong embedded control design keeps this loop intelligible. It should be possible to understand what is measured, when it is measured, how that measurement is transformed, when the candidate command is issued, how the safety layer filters it, how the actuator realizes it, and what physical assumptions make the command meaningful.
Without that discipline, the loop may still execute repeatedly while no longer regulating the physical process in the intended way. A loop can be active and still not be in control.
Controller Classes and Design Fit
Embedded control should not be reduced to one control method. The appropriate controller depends on the plant dynamics, sensing quality, timing budget, actuator authority, safety requirements, operating range, and available compute. A threshold controller may be appropriate for a simple thermal process. A high-rate motor drive may require PID, state feedback, feedforward compensation, observers, and carefully bounded saturation behavior. A constrained industrial process may require supervisory logic or model predictive control.
| Controller Class | Typical Use | Strength | Engineering Risk |
|---|---|---|---|
| Threshold or bang-bang control | Simple thermal, level, pressure, or on/off regulation | Simple, robust, easy to verify | Oscillation, wear, poor precision, hysteresis tuning |
| PID control | Motor speed, temperature, flow, position, pressure, process loops | Widely applicable, interpretable, low compute cost | Poor tuning, integrator windup, saturation, derivative noise |
| Feedforward plus feedback | Systems with known load or trajectory demand | Improves response by anticipating required command | Model mismatch can produce systematic error |
| State-feedback control | Systems where state can be measured or estimated | Uses richer state information than output-only control | Requires observability, estimation, and model validity |
| Observer-based control | Systems with partial or noisy measurement | Supports control from estimated state | Estimator drift or overconfidence can destabilize behavior |
| Gain scheduling | Plants whose dynamics change across operating regions | Adapts controller parameters across known regimes | Unsafe transitions or poor scheduling variable selection |
| Model predictive control | Constrained processes with optimization horizon | Handles constraints explicitly | Compute burden, solver timing, model mismatch |
| Adaptive control | Systems with changing or uncertain dynamics | Can adjust to changing plant behavior | Validation difficulty, safety during adaptation |
| Supervisory control | Mode management, startup, fault handling, interlocks | Coordinates nominal and abnormal behavior | Poorly defined transitions can create unsafe edge cases |
| Safety-filtered control | Physical systems with command or state safety limits | Prevents unsafe candidate commands from reaching actuators | Filter design must be testable, conservative, and logged |
Controller selection is therefore an engineering fit problem rather than a prestige hierarchy. The best controller is the one whose assumptions match the plant, hardware, timing, safety, and maintenance context. A simpler controller with strong timing discipline, good observability, and reliable fallback behavior may be more trustworthy than a sophisticated controller whose assumptions are invisible or untested.
Control Modes and Supervisory State Machines
Real embedded control systems do not live only in nominal closed-loop mode. They start up, calibrate, test sensors, enter control, detect warnings, degrade, stop, latch faults, and recover. Supervisory control defines how the system moves among these states.
| Mode | Purpose | Typical Entry Condition | Typical Exit Condition |
|---|---|---|---|
| Startup | Initialize hardware, clocks, memory, drivers, buses, sensors, and actuators | Power-on or reset | Initialization complete and self-checks pass |
| Calibration | Establish sensor offsets, actuator zero points, reference values, or safe baselines | Startup complete or recalibration request | Calibration valid and recorded |
| Open-loop test | Verify actuator response without full feedback authority | Maintenance, commissioning, or validation state | Response within expected bounds |
| Closed-loop nominal | Regulate the physical process under normal conditions | Measurements, estimator, timing, and actuator state valid | Warning, fault, stop, or command to exit |
| Warning | Signal degraded margin while preserving controlled operation | Elevated error, jitter, residual, saturation, or temperature | Return to nominal or transition to degraded/fault |
| Degraded control | Maintain limited control under weakened assumptions | Sensor weakness, actuator limitation, communication loss, thermal constraint | Recovery or escalation to safe stop/fault |
| Safe stop | Bring system into safe physical state | Command rejection, severe error, unsafe state, emergency stop, watchdog | Manual review, recovery procedure, or reset |
| Fault latch | Preserve a fault state until deliberate intervention | Serious violation, repeated failures, unsafe condition | Authorized reset or maintenance action |
| Recovery | Return from fault or degraded state under controlled conditions | Fault cleared or operator approval | Calibration, open-loop test, or nominal re-entry |
This state-machine structure is central to engineering maturity. A controller can regulate well in nominal mode and still be unsafe if startup, calibration, degraded control, fault latching, or recovery are poorly defined. Supervisory states make abnormal behavior part of the design rather than a collection of exception handlers scattered through firmware.
For engineers, every mode transition should be testable and logged. It should be clear why the system entered warning, why it degraded, why it stopped, what evidence was preserved, and what conditions are required before control can resume.
Control Hardware as Architectural Constraint
Embedded control is inseparable from hardware. Sensors, ADCs, DACs, timers, PWM generators, motor drivers, field buses, actuator interfaces, power electronics, and clocks all shape what kind of control is possible. A controller may appear mathematically sound and still behave poorly because the sampling chain is noisy, the actuator saturates, the conversion path is too slow, or the hardware timer cannot sustain the control period assumed by the design.
Hardware should therefore be treated as a control constraint, not just a carrier for software. Timer resolution affects control cadence. ADC settling and conversion latency affect the freshness of measurements. Bus arbitration and interrupt interference affect jitter. Driver capabilities affect whether commanded behavior is realizable under load.
Good control architecture makes hardware assumptions explicit. It identifies the sensing path, timing source, actuation interface, communication path, and failure characteristics of each. Control design is strongest when physical and electronic constraints are incorporated early rather than discovered after the algorithm is already fixed.
For engineers, the design question is not “can the microcontroller run this code?” The better question is: can this hardware platform sustain the loop timing, measurement quality, command precision, actuator power, safety response, and observability required by the controlled process?
Sampled-Data Control, Timing, Scheduling, and Jitter
Time is a functional property in embedded control. A control action that is logically correct but late may be physically wrong. A measurement that is accurate but stale may lead the controller to act on a world that no longer exists. A controller designed for one sampling period may behave differently when jitter, missed deadlines, or delayed actuation are introduced.
This is why scheduling policy, interrupt behavior, task preemption, timer design, and execution determinism matter so much. A control algorithm does not execute in abstraction. It executes inside a runtime environment with contention, asynchronous events, and deadlines. An embedded control system may fail not because the control law is conceptually weak, but because the software environment introduces enough jitter or delay to weaken the closed loop.
T_{\mathrm{loop}} = T_{\mathrm{sense}} + T_{\mathrm{compute}} + T_{\mathrm{communicate}} + T_{\mathrm{actuate}}
\]
Interpretation: Total loop time includes sensing, computation, communication, and actuation delay. Embedded control is viable only when this loop time and its jitter remain inside the stability and safety requirements of the physical system.
Good embedded control architecture begins with a temporal model. It defines the control period, sensing cadence, acceptable jitter, actuator deadlines, synchronization requirements, and degraded behavior when timing assumptions are violated. In control systems, time is not just something the system uses. It is something the system must continuously respect.
Timing Budget and Deadline Validity
A serious embedded control design should allocate the loop deadline across the stages that make up one control cycle. Without a timing budget, engineers may know the nominal control period but not why the system misses it, which component consumed the margin, or how much jitter the physical process can tolerate.
| Timing Stage | Example Budget | Engineering Concern | Evidence Signal |
|---|---|---|---|
| Sensor acquisition | 0.5 ms | Sampling cadence, sensor freshness, synchronization | Sensor timestamp, sample age |
| ADC conversion / signal conditioning | 0.2 ms | Conversion latency, filtering delay, quantization | DAQ latency, conversion status |
| Filtering / estimation | 0.4 ms | Residuals, stale estimates, state confidence | Estimator residual, estimate timestamp |
| Control computation | 0.3 ms | PID/state-feedback compute, fixed-point behavior, CPU load | Execution time, command value |
| Safety filtering | 0.1 ms | Command clipping, safe-set validation, interlocks | Filter decision, reason code |
| Bus transmission | 0.3 ms | SPI/I2C/CAN/EtherCAT/fieldbus delay, arbitration | Bus latency, retry count |
| Actuator update | 0.2 ms | PWM update, driver latency, actuator response | Actuator command timestamp |
| Watchdog margin | 0.5 ms | Protection against missed deadlines | Watchdog counter, deadline slack |
T_{\mathrm{loop}} + J_{\max} \leq T_{\mathrm{deadline}}
\]
Interpretation: The loop period plus worst-case jitter must remain inside the deadline required by the physical process. A controller designed for a nominal period can become unsafe or ineffective if jitter consumes the timing margin.
This equation is simple, but it is often where embedded control succeeds or fails. A controller that is stable at a nominal 1 ms loop period may not remain stable if the real system sometimes behaves like a 1.8 ms loop because of interrupt contention, bus delay, thermal throttling, logging overhead, or noncritical work stealing CPU time from the control task.
Timing budgets should therefore be measured, not assumed. Loop period, maximum jitter, deadline slack, missed deadlines, watchdog events, and stage-by-stage execution time should be part of the control log for serious systems.
State Estimation, Filtering, and Observability
Most embedded controllers do not have direct access to the full physical state they are trying to regulate. They receive partial, noisy, delayed, and sometimes indirect measurements. The system must therefore estimate or infer the relevant state from sensor signals. That can involve simple filtering, plausibility checks, sensor fusion, observers, or more formal estimation methods depending on the process.
This matters because control quality is bounded by visibility into the process. A controller cannot regulate what it cannot observe well enough. Poor calibration, aliasing, drift, delay, or unmodeled disturbance can make a nominally stable control strategy brittle in practice.
\hat{x}_{k+1} = A\hat{x}_k + Bu_k + L(y_k – C\hat{x}_k)
\]
Interpretation: This simplified observer form updates the estimated state \(\hat{x}\) using system dynamics, control input, measurement, and an error-correction term. The innovation \(y_k – C\hat{x}_k\) reveals the gap between expected measurement and observed measurement.
Good architecture distinguishes between raw measurements and operational state. It should be clear which signals are directly measured, which are filtered, which are inferred, which are stale, and how those distinctions affect the trust placed in control decisions. Estimation is not an optional enhancement. It is part of what makes the control loop meaningful.
Control Laws, Supervisory Logic, and Embedded Decision Structures
Embedded control systems may implement a wide range of control structures, from simple threshold logic and finite-state control to PID loops, state feedback, gain scheduling, supervisory logic, model-based control, or adaptive schemes. What matters architecturally is not the prestige of the method, but whether the control law fits the dynamics, timing, sensing quality, actuator limits, and computational budget of the platform.
Embedded control should not be idealized as a purely continuous-domain problem. Real controllers execute discretely, under quantization, with limited precision, finite scheduling windows, watchdog constraints, and software structures that may include interrupts, state machines, fixed-point arithmetic, and hardware abstraction layers.
The control law therefore lives inside a broader decision structure. The system must define startup conditions, calibration checks, nominal control, saturation handling, anti-windup behavior, watchdog behavior, interlock states, fallback modes, and shutdown behavior. A mathematically elegant controller can still be operationally fragile if supervisory logic is weak.
Strong design keeps these layers legible. It separates the nominal control objective from the supervisory conditions under which control is limited, suspended, overridden, or replaced by safe fallback behavior.
Safety Filtering, Interlocks, and Runtime Supervision
Embedded control systems often need a safety or supervision layer between nominal control and physical actuation. The nominal controller may compute a command, but that command should be checked against command limits, state constraints, actuator limits, thermal thresholds, operating modes, and fault conditions before it is applied.
This pattern is especially important in systems with physical consequence. A motor controller, heater, valve, pump, converter, robot joint, or medical actuator should not execute a command merely because the nominal algorithm produced it. The command should pass through runtime supervision.
u_k = F(u_k^\star, \hat{x}_k, \mathcal{S}, \mathcal{A})
\]
Interpretation: A safety filter \(F\) converts the candidate command \(u_k^\star\) into the command actually allowed for execution. The filter uses estimated state \(\hat{x}_k\), safety constraints \(\mathcal{S}\), and actuator constraints \(\mathcal{A}\) to allow, clip, modify, reject, or replace a command with fallback behavior.
Runtime supervision should be simple enough to test and strict enough to matter. It may include limit checks, rate-of-change checks, watchdogs, thermal constraints, actuator-state checks, state-machine guards, fault latching, and safe-stop transitions. In strong systems, the safety layer is not a vague “guardrail.” It is a machine-readable, logged, testable part of the control architecture.
Distributed and Networked Embedded Control
Many embedded control systems are distributed. Sensors, controllers, and actuators may be separated across nodes, buses, or networks. In such systems, communication is not merely informational. It is part of the control loop. Delayed messages, dropped packets, inconsistent clocks, or conflicting local decisions can change physical behavior directly.
This distributed character complicates control because the loop is no longer confined to one processor. Sampling may happen in one place, estimation in another, supervisory logic in another, and actuation elsewhere. The architecture must therefore define synchronization, message semantics, fault containment, and what happens when one part of the distributed loop continues while another is delayed or unavailable.
Good distributed control architecture does not assume that communication is transparent. It treats network behavior as part of the control design and operational policy. Message freshness, timestamping, latency budgets, clock synchronization, retransmission policy, and local fallback behavior become control concerns, not only networking concerns.
For engineers, the design question is not only whether nodes can exchange messages. It is whether message timing, freshness, and failure behavior preserve the meaning of the closed loop.
Stability, Robustness, and Failure Containment
Embedded control systems are often safety-relevant because they directly affect motion, energy flow, mechanical behavior, thermal behavior, fluid flow, voltage, current, or other physical processes with real consequences. That means the controller must be evaluated not only for nominal regulation, but for stability under disturbance, safe behavior under sensor faults, bounded action under actuator limits, and containment of failure when parts of the loop degrade.
Safety and stability are related but not identical. A loop may be stable and still unsafe under certain operational conditions. Conversely, a system may use safety interlocks or fallback modes that deliberately sacrifice control performance to preserve safety. Good embedded control design therefore makes safety logic explicit rather than assuming nominal control correctness automatically implies safe system behavior.
V(e_k) \geq 0,\qquad V(e_{k+1}) – V(e_k) \leq 0
\]
Interpretation: \(V(e_k)\) is an energy-like function of tracking or regulation error. If \(V\) does not increase over time under the modeled assumptions, the loop is moving toward more stable behavior. Real embedded systems must still account for saturation, delay, jitter, noise, quantization, and unmodeled dynamics.
Failure containment is especially important in composed systems. A stale sensor estimate may distort the control signal, which may drive an actuator toward saturation, which may affect adjacent loops or coordinated subsystems. Strong architecture designs for bounded consequences, not just ideal control performance.
| Containment Mode | When It Applies | Control Behavior |
|---|---|---|
| Continue nominal control | Error, timing, estimator residuals, actuator state, and safety margin are valid | Run normal closed-loop control |
| Command clipping | Candidate command exceeds actuator or safety limit | Apply bounded command and log saturation/filter reason |
| Reduced-gain control | Jitter, noise, residuals, thermal limits, or uncertainty increase | Use conservative gains or slower response |
| Open-loop fallback | Feedback becomes unavailable but safe limited actuation remains possible | Use predefined bounded command for limited time |
| Degraded control | Some sensing, timing, actuator, or communication assumptions weaken | Restrict operating envelope and increase safety margins |
| Safe stop | State, command, timing, or safety constraint becomes unacceptable | Bring process to safe physical state |
| Fault latch | Serious or repeated violation occurs | Hold fault state until deliberate reset or maintenance |
| Manual or supervisory mode | Local loop can no longer regulate safely without higher-level intervention | Transfer authority to operator, PLC, supervisory system, or maintenance workflow |
| Isolation | Distributed control integrity or security trust is weakened | Disconnect from coordination, preserve evidence, restrict actuation |
Containment modes should be designed and tested before deployment, not improvised after failure. A controller that performs well in nominal operation but has unclear behavior under saturation, missed deadlines, sensor dropout, or estimator divergence is not a mature embedded control system.
Verification, Validation, and Trustworthiness
Verification in embedded control is harder than verification in purely digital systems because the controller participates in physical dynamics. It is not enough to show that code paths are correct or that state transitions are valid. The design must also be validated against timing assumptions, sensing quality, physical plant behavior, actuator constraints, and the interaction of software decisions with real hardware.
Compositional reasoning is especially difficult. A sensor subsystem, control task, and actuator interface may each behave correctly in isolation yet still produce unstable or unsafe results when composed under delay, jitter, saturation, or disturbance. Good verification therefore reasons about the whole loop: measurement, estimation, computation, scheduling, communication, actuation, and physical response.
Trustworthy embedded control requires multiple kinds of validation:
- Model validation: checking whether the plant model represents the operating region well enough.
- Timing validation: measuring loop period, jitter, deadline misses, and worst-case execution behavior.
- Control validation: testing tracking, regulation, overshoot, settling, disturbance response, and saturation behavior.
- Fault validation: injecting sensor, actuator, bus, scheduler, and runtime faults.
- Safety validation: confirming safe-state transitions, interlocks, command filtering, and containment behavior.
A trustworthy embedded control system is one whose behavior remains understandable not only under nominal conditions, but under fault, delay, partial observability, saturation, timing uncertainty, and degraded operation.
Worked Example: DC Motor Speed Control Loop
Consider a DC motor speed-control system. The engineering objective is to regulate motor speed to a target value while respecting actuator limits, timing deadlines, current limits, and safe fallback behavior. This is a simple example, but it exposes the same design structure used in larger embedded control systems.
| Step | System Action | Engineering Evidence |
|---|---|---|
| Setpoint | Supervisor requests target speed, such as 1200 RPM | Setpoint timestamp, requested mode, authority source |
| Measurement | Encoder measures shaft position pulses | Encoder count, sample timestamp, signal validity |
| Estimation | Firmware converts pulses into filtered speed estimate | Estimated speed, filter configuration, residual or plausibility check |
| Error calculation | Controller computes difference between target and estimated speed | Speed error, previous error, integral error |
| Candidate command | PID computes candidate PWM duty cycle | Candidate command, gains, anti-windup state |
| Safety filter | Runtime supervisor clips command and checks current, temperature, and speed bounds | Filtered command, saturation flag, reason code |
| Actuation | PWM output updates motor driver | PWM duty cycle, driver status, current draw |
| Timing validation | Loop verifies that sensing, compute, filtering, and PWM update met deadline | Loop period, jitter, deadline slack, watchdog state |
| Monitoring | System logs speed error, saturation, current, temperature, and supervisory state | Control-loop log, safety state, fault or recovery record |
The nominal control loop may be straightforward, but the engineering quality depends on what happens outside nominal conditions. If the motor is loaded suddenly, the controller may increase duty cycle. If the duty cycle saturates, anti-windup should prevent the integral term from growing without bound. If current rises too high, the safety filter should clip or reject the command. If the loop misses its deadline, the system should record a timing fault. If encoder readings become stale or implausible, the controller should not continue acting as if speed is known.
This example shows why embedded control is not “PID plus PWM.” It is a full loop: setpoint, measurement, estimation, candidate command, filtered command, actuator realization, timing validation, monitoring, and fallback. The same structure applies to pumps, valves, heaters, converters, robotic joints, power systems, and many other physical regulation problems.
Data and Configuration Artifacts
Embedded control systems become easier to test, tune, and govern when their assumptions are represented as data and configuration artifacts. Engineers should be able to inspect loop timing, controller gains, actuator limits, estimator thresholds, safety envelopes, hardware profiles, and fault-state behavior without relying only on undocumented code or tribal memory.
| Artifact | What It Captures | Engineering Purpose |
|---|---|---|
plant_model.yml |
State variables, inputs, outputs, dynamics, operating region, disturbance assumptions | Connects the controller to the physical process |
control_loop_spec.yml |
Loop period, deadline, jitter tolerance, sampling cadence, control task priority | Makes real-time assumptions explicit |
timing_budget.yml |
Sensor, ADC, estimator, control, safety-filter, bus, actuator, and watchdog timing allocations | Turns timing from an assumption into a testable budget |
sensor_calibration.csv |
Offsets, scales, units, noise assumptions, calibration date, validity range | Supports trustworthy measurement and estimation |
estimator_config.yml |
Filter gains, state vector, residual thresholds, freshness requirements | Makes state estimation reviewable and testable |
controller_config.yml |
PID gains, state-feedback gains, sampling period, anti-windup, command limits | Makes control behavior reproducible and tunable |
actuator_profile.yml |
Command range, slew rate, dead zone, current, torque, thermal, saturation limits | Prevents physically unrealistic commands |
safety_envelope.yml |
Allowed states, command bounds, fault thresholds, interlocks, fallback behavior | Constrains control under unsafe or degraded conditions |
supervisory_state_machine.yml |
Startup, calibration, open-loop test, nominal, warning, degraded, safe stop, fault, and recovery transitions | Defines operational behavior outside nominal control |
control_loop_log.csv |
Setpoint, measurement, estimate, error, candidate command, filtered command, saturation, latency, jitter, safety state | Supports debugging, tuning, monitoring, and incident review |
control_event_schema.sql |
Tables for loop events, estimator residuals, command filtering, actuator states, and faults | Makes control evidence queryable and auditable |
The goal is not to force one control framework or file format. The goal is to make the control system inspectable. If loop assumptions cannot be found in artifacts, they will be difficult to validate, maintain, or recover after deployment.
Mathematical Lens: Discrete-Time Feedback, Stability, Saturation, and Timing
A practical mathematical lens for embedded control begins with discrete-time feedback. The physical process evolves continuously, but the embedded controller samples, computes, and commands at discrete intervals.
e_k = r_k – y_k
\]
Interpretation: \(e_k\) is the control error at time step \(k\), \(r_k\) is the reference or setpoint, and \(y_k\) is the measured or estimated output. Regulation depends on reducing this error without violating timing, actuator, or safety constraints.
u_k^\star = K_p e_k + K_i \sum_{j=0}^{k} e_j \Delta t + K_d \frac{e_k – e_{k-1}}{\Delta t}
\]
Interpretation: This PID-style law computes a candidate command \(u_k^\star\) from proportional, integral, and derivative terms. In real embedded systems, this command must still be bounded by actuator limits, timing constraints, anti-windup logic, and safety supervision.
u_k = \mathrm{clip}(u_k^\star, u_{\min}, u_{\max})
\]
Interpretation: Actuator saturation clips the candidate command into the physically allowed range. Saturation should be measured and logged because frequent clipping may indicate bad tuning, unrealistic setpoints, undersized actuators, or degraded process behavior.
\Delta t_k = t_k – t_{k-1}
\]
Interpretation: The effective sampling interval \(\Delta t_k\) may vary because of scheduler jitter, interrupt behavior, bus delay, or runtime contention. Control performance depends on the actual timing, not only the nominal loop period.
T_{\mathrm{loop}} + J_{\max} \leq T_{\mathrm{deadline}}
\]
Interpretation: The control-loop execution time plus worst-case jitter must remain within the physical process deadline. This connects controller design to embedded scheduling and real-time execution.
The key engineering point is that embedded control math must be connected to implementation. A controller is not only a formula. It is a sampled, delayed, quantized, saturated, supervised, and physically realized feedback process. Tracking error, command output, saturation, loop timing, estimator residuals, settling behavior, overshoot, deadline slack, and safe-state transitions should be logged and analyzed.
Python Workflow: Embedded Control Simulation with Saturation, Delay, and Jitter
The companion Python workflow should model a simplified embedded control loop using a discrete-time plant, PID control, actuator saturation, timing jitter, process disturbance, and measurement noise. The goal is to show how engineers can turn control concepts into reproducible analysis before deploying code to firmware or field hardware.
# Python Workflow: Embedded Control Simulation with Saturation, Delay, and Jitter
error = reference - measured_output
integral_error += error * dt
derivative_error = (error - previous_error) / dt
candidate_command = (
kp * error
+ ki * integral_error
+ kd * derivative_error
)
filtered_command = safety_filter(
candidate_command=candidate_command,
estimated_state=estimated_state,
safety_envelope=safety_envelope,
actuator_profile=actuator_profile
)
next_state = A @ state + B.flatten() * filtered_command + disturbance
This workflow is useful for testing control assumptions before moving to firmware. It can evaluate tracking error, regulation error, overshoot, settling time, saturation rate, safety-filter activity, jitter sensitivity, noise sensitivity, disturbance response, and safe-state transitions.
For production systems, the same workflow can be connected to real logs from microcontrollers, PLCs, motor drives, edge gateways, or embedded Linux controllers. Engineers can then compare commanded behavior against measured behavior and identify whether failures arise from controller tuning, timing jitter, measurement noise, actuator limits, scheduler interference, safety-filter rules, or plant-model mismatch.
R Workflow: Control-Loop Performance and Reliability Reporting
The companion R workflow should focus on reporting. It can summarize control error, actuator saturation, timing jitter, deadline misses, estimator residuals, safety states, and performance differences across devices, loops, operating modes, or sites. Where Python is useful for simulation and algorithmic workflows, R is useful for descriptive summaries, trend reporting, reliability review, and engineering communication.
# R Workflow: Control-Loop Performance and Reliability Reporting
control_summary <- control_logs |>
dplyr::group_by(device_id, loop_id, operating_mode) |>
dplyr::summarise(
samples = dplyr::n(),
mean_abs_error = mean(abs(control_error), na.rm = TRUE),
max_abs_error = max(abs(control_error), na.rm = TRUE),
saturation_rate = mean(saturated, na.rm = TRUE),
safety_filter_rate = mean(candidate_command != filtered_command, na.rm = TRUE),
deadline_miss_rate = mean(deadline_missed, na.rm = TRUE),
mean_loop_jitter_ms = mean(loop_jitter_ms, na.rm = TRUE),
safety_events = sum(safety_state != "normal", na.rm = TRUE),
.groups = "drop"
)This workflow helps engineering teams distinguish isolated anomalies from systematic control design problems. If one loop saturates frequently, the actuator may be undersized or the setpoint unrealistic. If one device has high jitter, the issue may be scheduling or bus contention. If one operating mode has high error, the controller may not match that region of the plant.
For embedded fleets and industrial systems, reporting is essential because physical systems drift. Sensors age. Loads change. Firmware updates alter timing. Actuators wear. Reporting turns these changes into engineering evidence rather than anecdotal troubleshooting.
Systems Code: Firmware, Control Loops, MicroPython, TinyML, PYNQ, HDL, Bash, and Configuration
The companion repository should be useful to engineers because embedded control crosses the full stack. It touches firmware, real-time loops, actuator drivers, state machines, simulation, reporting, timing analysis, safety envelopes, constrained inference, FPGA-backed acceleration, HDL timing blocks, and repeatable workflow scripts.
| Folder | Engineering Role | Control Use |
|---|---|---|
python/ |
Simulation and workflow automation | Plant simulation, PID/state-feedback analysis, saturation modeling, jitter sensitivity |
r/ |
Reporting and descriptive analytics | Control-loop performance summaries, saturation reporting, reliability review |
sql/ |
Queryable engineering evidence | Stores loop events, candidate commands, filtered commands, estimator residuals, actuator states, and safety transitions |
c/ |
Constrained embedded control | PID loop, command clipping, anti-windup, watchdog checks, real-time task scaffold |
cpp/ |
Control middleware and state-machine abstraction | Supervisory control, mode transitions, command validation, actuator interface logic |
rust/ |
Safe systems validation | Command-bound validation, state-machine safety, configuration checking |
go/ |
Operational services and telemetry utilities | Control-event gateway, timing-event router, fleet monitoring service |
micropython/ |
Microcontroller prototypes | Sensor reading, local control demonstration, actuator command telemetry |
tinyml/ |
Constrained local inference | Anomaly detection for saturation, vibration, sensor faults, or loop degradation |
pynq/ |
FPGA-backed acceleration | Low-latency filtering, PWM preprocessing, encoder processing, stream validation |
hdl/ |
Hardware/software co-design | PWM generator, timing monitor, safety gate, encoder processing scaffolds |
bash/ |
Repeatable workflow execution | Runs simulations, validates manifests, generates output summaries |
config/ |
Machine-readable control metadata | Plant models, controller settings, estimator configs, timing budgets, safety envelopes |
This cross-layer stack matters because control performance is not created by one component. The same design concern appears in firmware, hardware timers, actuator limits, control math, telemetry, safety policy, data analysis, and hardware acceleration.
Testing and Validation
Embedded control systems should be validated as physical feedback systems, not merely as software modules. Engineers should test timing, stability, tracking, disturbance rejection, saturation, estimation, fault detection, recovery, safety boundaries, and degraded operation under realistic conditions.
A practical validation suite should answer these questions:
- Does the controller regulate or track within acceptable error bounds?
- Does the loop remain stable under sensor noise, disturbance, and timing jitter?
- Does the system detect stale, missing, saturated, or inconsistent measurements?
- Does actuator saturation occur, and is it detected?
- Are candidate commands filtered before reaching the actuator?
- Are command bounds, slew limits, current limits, temperature limits, and safe-state rules enforced?
- Are control-loop frequency, latency, deadline slack, and jitter within design tolerance?
- Can the supervisory state machine transition cleanly among startup, calibration, open-loop test, nominal, warning, degraded, safe stop, fault, and recovery?
- Can the system detect and respond to scheduler overruns, deadline misses, and watchdog events?
- Are TinyML fault models, PYNQ overlays, and HDL timing or safety blocks versioned and validated?
- Can logs reconstruct what the system measured, estimated, commanded, filtered, and physically did?
Testing should include negative cases. Engineers should deliberately test delayed sensor updates, actuator saturation, sensor drift, bus jitter, missed deadlines, emergency stop behavior, command rejection, estimator divergence, thermal stress, and recovery after fault. Embedded control fails most dangerously when the system continues acting confidently after its loop assumptions have been invalidated.
Operational Signals and Control Observability
Control observability is the ability to understand whether the physical process is being regulated as intended. It should not be limited to whether the device is online. A controller can be online while tracking poorly, saturating commands, missing deadlines, acting on stale measurements, or operating near unsafe limits.
| Signal | What It Reveals | Why Engineers Need It |
|---|---|---|
| Control error | Difference between setpoint and measured or estimated output | Shows whether the loop is regulating the intended variable |
| Estimator residual | Difference between predicted and observed measurement | Reveals sensor faults, model mismatch, or estimation drift |
| Loop period and jitter | Timing stability of control execution | Detects scheduler, interrupt, bus, or runtime problems |
| Deadline misses | Whether control computation exceeded its timing budget | Identifies real-time execution risk |
| Deadline slack | Remaining time margin after loop execution | Reveals whether timing margin is eroding |
| Command saturation | Whether the controller demanded more than the actuator can provide | Identifies poor tuning, unrealistic setpoints, or undersized actuators |
| Safety-filter reason code | Why a command was allowed, clipped, modified, rejected, or replaced | Supports runtime supervision review |
| Actuator current, torque, power, or temperature | Physical load state | Supports safety, wear monitoring, and failure prevention |
| Sensor freshness | Age and validity of measurements | Prevents control based on stale inputs |
| Safety-envelope margin | Distance from unsafe state or command boundary | Supports proactive safety review |
| Supervisory state | Startup, calibration, nominal, warning, degraded, safe stop, fault, or recovery state | Shows how the system handled abnormal conditions |
| Recovery events | When watchdogs, fallback modes, or operator interventions occurred | Supports root-cause analysis and reliability improvement |
Engineers should design these signals before deployment. If the system cannot reconstruct what it sensed, estimated, commanded, filtered, and did physically, then debugging control behavior becomes guesswork.
Common Failure Modes
Embedded control systems fail in predictable ways because digital computation and physical dynamics are tightly coupled. Engineers should design the architecture, tests, and observability around these failure modes from the beginning.
- Stale measurement: the controller acts on a value that no longer represents the physical process.
- Estimator drift: the estimated state diverges from the true physical state.
- Unobservable state: the controller depends on a variable the sensor suite cannot estimate reliably.
- Actuator saturation: the controller commands beyond physical, current, torque, thermal, or range limits.
- Integrator windup: accumulated error causes poor recovery after saturation or constraint violation.
- Timing jitter: loop timing varies enough to weaken stability, tracking, or disturbance rejection.
- Deadline miss: the control task does not complete before the next required action.
- Aliasing: sampling misrepresents the physical signal being controlled or monitored.
- Quantization error: limited resolution distorts measurement or command precision.
- Mode-transition fault: startup, shutdown, degraded mode, or recovery behavior is poorly defined.
- Network delay: distributed loops act on delayed messages or inconsistent state.
- Safety-filter bypass: nominal control commands reach actuators without runtime supervision.
- Insufficient logging: logs record commands but not enough measurement, timing, filtering, or physical response context.
A mature embedded control architecture does not assume these failures can be eliminated. It makes them detectable, bounded, testable, and recoverable.
Trade-Offs in Embedded Control Design
Embedded control systems are shaped by trade-offs that cannot all be optimized at once. Faster control can increase computational burden. Richer sensing can improve observability while adding noise, complexity, calibration burden, and latency. More distribution can improve modularity and scalability while increasing coordination burden and timing uncertainty. Higher assurance can improve trust but increase development and verification cost.
The right design depends on physical stakes and operating context. A motor drive, medical device, industrial controller, vehicle subsystem, smart building loop, and robotic actuator all require different balances of timing, safety, complexity, redundancy, observability, and cost.
Good embedded control architecture is therefore proportional. It matches control complexity, loop rate, sensing quality, actuator authority, safety supervision, timing discipline, and validation burden to the seriousness of the physical consequence being governed.
This is one reason the cyber-physical perspective is so useful: it prevents engineers from optimizing software, hardware, and physical assumptions independently when the true behavior emerges only from their interaction.
Applications in Embedded and Edge Systems
Servo and motion control. Robotics, machine tools, and positioning systems depend on high-rate sensing, bounded timing, and actuator interfaces that can realize precisely timed control commands.
Industrial process control. Process plants and industrial equipment rely on embedded controllers to regulate flow, pressure, temperature, speed, and coordinated machine behavior under disturbance, delay, and safety constraints.
Automotive and mobility subsystems. Braking, steering assistance, powertrain management, suspension control, battery systems, and other vehicle subsystems are embedded control problems because sensing, estimation, timing, and actuation directly influence physical behavior.
Medical and therapeutic devices. Infusion devices, physiological regulation systems, prosthetic controllers, and other medical platforms often depend on embedded control logic that must remain robust under uncertain sensing and strict safety expectations.
Power electronics and energy systems. Inverters, converters, chargers, storage systems, and grid-connected devices depend on tightly timed control of voltage, current, switching, thermal behavior, and protection states.
Infrastructure and building control. HVAC, energy coordination, pumping systems, water infrastructure, and smart infrastructure systems become embedded control systems when they move beyond monitoring into continuous regulation of physical processes.
Autonomous and edge-intelligent systems. Autonomy ultimately depends on control realization. Local intelligence may choose an action, but embedded control turns that action into bounded physical behavior.
The unifying pattern is not one market segment. It is the need to regulate physical behavior through a closed loop that remains timely, stable, observable, and safe.
Engineer Checklist
- Define the plant, controlled variables, measured variables, control inputs, outputs, disturbances, and operating region.
- Separate raw measurement, filtered signal, estimated state, candidate command, filtered command, and physical response.
- Document sensor calibration, units, sampling rate, measurement noise, aliasing risk, freshness requirements, and validity range.
- Set explicit timing budgets for sensing, ADC conversion, filtering, computation, safety filtering, communication, actuation, watchdog response, and safe-state transition.
- Track loop period, jitter, deadline misses, deadline slack, control error, estimator residuals, command saturation, and safety-envelope margin.
- Document actuator limits: command range, slew rate, current, torque, thermal limits, dead zones, saturation, and failure modes.
- Implement anti-windup, command clipping, state guards, interlocks, watchdogs, safe fallback, and reason-code logging where needed.
- Design supervisory states for startup, calibration, open-loop test, nominal control, warning, degraded mode, safe stop, fault latch, and recovery.
- Validate control behavior under noise, disturbance, delay, jitter, actuator saturation, sensor dropout, and plant-model mismatch.
- Version TinyML models, PYNQ overlays, HDL timing blocks, controller configs, estimator configs, timing budgets, and safety policies.
- Use logs that record not only commands, but measurements, estimates, candidate commands, filtered commands, timing, saturation, safety state, and physical response.
- Test distributed control behavior under message delay, loss, clock drift, partial failure, and degraded connectivity.
This checklist is intentionally practical. Embedded control systems become trustworthy when engineers can explain what the system sensed, what it estimated, what it commanded, what the safety layer allowed, what the actuator realized, what the physical process did, and how the loop behaved when its assumptions weakened.
GitHub Repository
This article is supported by a companion workflow that models embedded control using plant simulations, controller configurations, timing budgets, saturation analysis, estimator residuals, safety envelopes, supervisory state machines, telemetry schemas, firmware-style examples, and cross-layer validation workflows.
Complete Code RepositoryThe companion repository includes Python, R, SQL, C, C++, Rust, Go, MicroPython, TinyML, PYNQ, HDL, Bash, YAML/JSON configuration, notebooks, firmware-style scaffolds, plant models, PID and state-feedback examples, timing analysis, safety filtering, actuator profiles, estimator configuration, supervisory-state validation, DC motor speed-control examples, and tests for embedded control systems.
Where This Fits in the Series
This article extends the foundation established in Cyber-Physical Systems and Hardware Integration, Data Acquisition and Embedded Sensor Interfaces, Calibration, Noise, and Measurement Integrity in Sensor Systems, and Edge Computing Architectures by focusing more specifically on the closed-loop logic that regulates physical behavior in real time.
It also connects directly to Robotics, Actuation, and Physical Feedback Loops and Autonomous Systems and Edge Intelligence. Robotics depends on embedded control to realize motion, and autonomy depends on embedded control to turn local decisions into bounded physical behavior.
Related articles
- Embedded and Edge Systems: Real-Time Computing in Devices, Sensors, and Infrastructure
- Cyber-Physical Systems and Hardware Integration
- Data Acquisition and Embedded Sensor Interfaces
- Calibration, Noise, and Measurement Integrity in Sensor Systems
- Edge Computing Architectures
- Robotics, Actuation, and Physical Feedback Loops
- Autonomous Systems and Edge Intelligence
Further reading
- Åström, K.J. and Murray, R.M. (2021) Feedback Systems: An Introduction for Scientists and Engineers. Available at: https://fbsbook.org/
- Lee, E.A. and Seshia, S.A. (n.d.) Introduction to Embedded Systems: A Cyber-Physical Systems Approach. Available at: https://ptolemy.berkeley.edu/books/leeseshia/download.html
- NIST (2017) Framework for Cyber-Physical Systems: Volume 3, Timing Annex. Available at: https://nvlpubs.nist.gov/nistpubs/SpecialPublications/NIST.SP.1500-203.pdf
- NIST (1992) A Real-Time Control System Methodology for Developing Intelligent Machine Control Systems. Available at: https://nvlpubs.nist.gov/nistpubs/Legacy/IR/nistir4936.pdf
- NIST (2022) Guide to Industrial Control Systems Security. Available at: https://nvlpubs.nist.gov/nistpubs/specialpublications/nist.sp.800-82r2.pdf
- NSF (2024) Cyber-Physical Systems. Available at: https://www.nsf.gov/funding/opportunities/cps-cyberphysical-systems/503286/nsf24-581/solicitation
- Lynch, K.M. and Park, F.C. (2017) Modern Robotics: Mechanics, Planning, and Control. Available at: https://modernrobotics.northwestern.edu/
References
- Åström, K.J. and Murray, R.M. (2021) Feedback Systems: An Introduction for Scientists and Engineers. Available at: https://fbsbook.org/
- Lee, E.A. and Seshia, S.A. (n.d.) Introduction to Embedded Systems: A Cyber-Physical Systems Approach. Available at: https://ptolemy.berkeley.edu/books/leeseshia/download.html
- Lynch, K.M. and Park, F.C. (2017) Modern Robotics: Mechanics, Planning, and Control. Available at: https://modernrobotics.northwestern.edu/
- NIST (1992) A Real-Time Control System Methodology for Developing Intelligent Machine Control Systems. Available at: https://nvlpubs.nist.gov/nistpubs/Legacy/IR/nistir4936.pdf
- NIST (2017) Framework for Cyber-Physical Systems: Volume 1, Overview. Available at: https://nvlpubs.nist.gov/nistpubs/SpecialPublications/NIST.SP.1500-201.pdf
- NIST (2017) Framework for Cyber-Physical Systems: Volume 2, Working Group Reports. Available at: https://nvlpubs.nist.gov/nistpubs/SpecialPublications/NIST.SP.1500-202.pdf
- NIST (2017) Framework for Cyber-Physical Systems: Volume 3, Timing Annex. Available at: https://nvlpubs.nist.gov/nistpubs/SpecialPublications/NIST.SP.1500-203.pdf
- NIST (2022) Guide to Industrial Control Systems Security. Available at: https://nvlpubs.nist.gov/nistpubs/specialpublications/nist.sp.800-82r2.pdf
- NSF (2024) Cyber-Physical Systems. Available at: https://www.nsf.gov/funding/opportunities/cps-cyberphysical-systems/503286/nsf24-581/solicitation