
Last Updated May 7, 2026
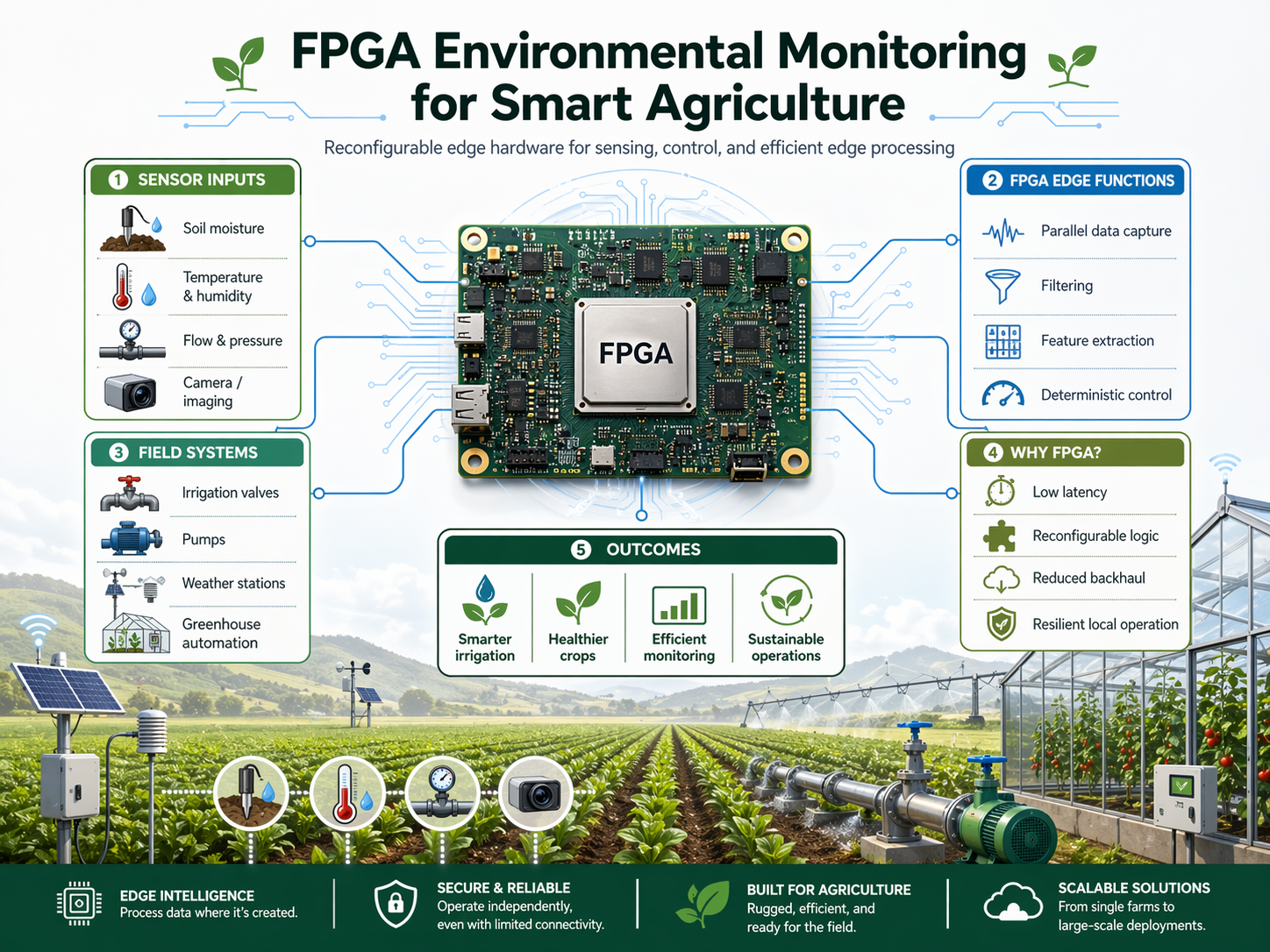
FPGA environmental monitoring matters in smart agriculture because agricultural sensing is not only a data-collection problem. It is a real-time systems problem involving signal acquisition, filtering, control, communication reduction, and fault-tolerant edge response under harsh field constraints. Modern agricultural systems generate continuous streams of environmental data from soil probes, irrigation infrastructure, weather instruments, greenhouse controls, water-quality systems, vibration sensors, and imaging devices. The engineering challenge is not simply how to capture those signals, but how to process them fast enough, robustly enough, and efficiently enough to support real decisions in the field.
Field-programmable gate arrays, or FPGAs, are relevant in this setting because they allow repeated sensing and processing tasks to be implemented directly in reconfigurable hardware rather than only through sequential software running on a CPU. That architectural difference matters when a system must sample multiple channels concurrently, perform deterministic low-latency filtering, preserve control behavior during connectivity loss, or reduce the burden of transmitting raw data streams upstream. In smart agriculture, those are not edge cases. They are ordinary deployment conditions.
Main Library
Publications
Article Map
Sustainable Development
Related Topic
Embedded & Edge Systems

This article treats FPGA environmental monitoring as an engineering reference for reconfigurable edge hardware in agriculture. It focuses on workload structure, architecture selection, sensor front ends, streaming signal paths, local control loops, Linux-capable gateways, PYNQ-based prototyping, lightweight inference integration, power constraints, verification strategy, and field deployment trade-offs. The goal is not to argue that every agricultural system needs an FPGA. The goal is to show clearly when FPGA-based monitoring is justified, what it should be doing, and how to evaluate it as part of a resilient agricultural infrastructure stack.
The broader sustainable-development question is whether agricultural digital infrastructure can improve food-system resilience, water efficiency, field reliability, and environmental visibility without becoming unnecessarily expensive, fragile, energy-intensive, or difficult to maintain. FPGA systems can help where deterministic processing, local control, and data reduction are genuinely needed. They can also be excessive where a simpler microcontroller would meet the same field requirement with less complexity. A serious engineering approach must be able to tell the difference.
Why FPGA Environmental Monitoring Matters
Environmental monitoring in agriculture is not just about sensing. It is about whether sensing can be turned into timely, trustworthy, and operationally useful action. A farm, greenhouse, irrigation district, reservoir system, or food-production facility does not benefit from raw measurements alone. It benefits when those measurements can be filtered, interpreted, and translated into decisions under real conditions of environmental noise, communication limits, field failure, and operational uncertainty.
This is where FPGA-based monitoring becomes valuable. An FPGA can sit close to the physical system and execute repeated sensing and processing tasks concurrently in hardware: multi-channel acquisition, timestamping, calibration, thresholding, feature extraction, packet framing, and local decision logic. The result is not simply faster execution. It is a more deterministic edge architecture that can continue to function even when connectivity is degraded or cloud processing is unavailable.
That determinism matters in agricultural settings because sensing and control often happen inside tight operational windows. Irrigation pressure drops may need to be detected before pumps are damaged. Greenhouse ventilation may need to respond before heat stress accumulates. Water-quality anomalies may require local alarms before upstream systems receive batch data. Soil and moisture conditions may not require microsecond response, but they often require reliable field behavior over long unattended deployments.
FPGA monitoring also matters because agricultural environments are data-rich but connectivity-constrained. Transmitting raw sensor streams from every node is often expensive, power-hungry, and unnecessary. A reconfigurable edge node can reduce data close to the source by converting raw signals into summaries, events, features, and alerts. This lowers backhaul burden and makes digital agriculture more viable in remote or infrastructure-limited environments.
That makes FPGA environmental monitoring a useful topic not only for precision agriculture, but for agricultural resilience more broadly. It connects sensing infrastructure, water management, field control, power discipline, edge computing, and digital-governance capacity into one integrated engineering problem.
Engineering Design Targets
A credible FPGA agricultural monitoring design should begin with explicit engineering targets rather than vague claims about smart agriculture or edge intelligence. The design should define what must be measured, how quickly decisions must be made, how much energy can be used, how much data can be transmitted, how failures will be handled, and what forms of local control must remain available under degraded conditions.
Sampling requirements include the number of sensor channels, sample rates, ADC resolution, timestamp precision, synchronization needs, interface types, calibration requirements, and acceptable measurement uncertainty. Soil moisture, pressure, flow, pH, salinity, temperature, humidity, vibration, and imaging inputs do not behave alike. Each sensor stream imposes different timing, precision, noise, and interface constraints.
Latency budgets define the maximum acceptable sensor-to-decision delay for irrigation, ventilation, pump protection, dosing, frost response, water-quality alerting, or greenhouse climate control. A soil-moisture trend may tolerate minutes of delay. A pump-protection cutoff may require much tighter response. The FPGA is justified only when the latency requirement and workload structure make hardware-level determinism useful.
Power envelopes define active power, idle power, daily energy budget, solar-buffer assumptions, battery autonomy, and fallback operation under degraded energy supply. In field agriculture, power constraints are not abstract. They determine whether a system survives cloudy weeks, seasonal extremes, pump-house instability, or long unattended intervals.
Communication-reduction targets define acceptable raw-to-processed reduction ratios, uplink duty cycle, event-transmission rules, backhaul failure behavior, and local storage requirements. If a node is expected to reduce raw sensor traffic by 95 percent, that target should be tested directly rather than assumed.
Reliability requirements include watchdog recovery time, local safe-state behavior, field-update rollback, actuator fault tolerance, acceptable packet loss, sensor-failure detection, and behavior during network outages. Agricultural systems are exposed to dust, water, insects, heat, vibration, corrosion, unstable power, and human maintenance variability. Field reliability must therefore be engineered rather than hoped for.
These targets matter because they define whether reconfigurable logic is actually solving a meaningful problem. Without them, FPGA discussion risks collapsing into generic enthusiasm about hardware acceleration rather than disciplined system design.
When FPGA Is Actually Justified
FPGA deployment is justified when the monitoring workload requires capabilities that are awkward, inefficient, or operationally fragile in MCU-only or CPU-only systems. In agriculture, this usually means that multiple streams must be processed concurrently, deterministic local response matters, or communication reduction is valuable enough to justify the additional engineering complexity.
A strong FPGA use case exists when multiple continuous or semi-continuous sensor streams must be acquired and processed at the same time. Pressure, flow, vibration, water quality, and climate signals may need parallel capture and filtering. A CPU can perform those operations, but timing may become more variable under load. An FPGA can implement dedicated data paths for each stream.
Another strong use case exists when deterministic low-latency response is required for local actuation or safety behavior. Pump protection, irrigation shutoff, valve sequencing, greenhouse ventilation, or dosing control may need predictable response even when network access fails or Linux services are busy. FPGA logic can preserve a local control path independent of higher-level software.
FPGAs are also justified when streaming filters or feature extractors create too much burden for software-only execution. Moving averages, FIR filters, threshold pipelines, rolling variance, pulse counting, frequency estimation, packet framing, timestamp alignment, and signal-window extraction can map efficiently to hardware. The value is highest when these operations are frequent and structurally repetitive.
Backhaul constraints can also justify FPGA processing. If raw data streams are too costly to transmit from remote fields, greenhouses, reservoirs, or irrigation infrastructure, FPGA-side preprocessing can reduce communication to event records, summaries, alerts, and features. In many deployments, reducing radio time may save more energy than reducing compute time.
By contrast, an FPGA is usually not justified for low-rate sensing with loose timing requirements and minimal local control complexity. In those cases, a microcontroller remains the cleaner, cheaper, lower-power, and easier-to-maintain choice. FPGA deployment should be based on workload structure, latency needs, fleet value, and lifecycle benefit, not on the appeal of reconfigurable hardware in the abstract.
Platform Comparison: MCU vs FPGA vs Linux + FPGA Gateway
Platform selection in agricultural monitoring should be treated as a workload-allocation problem. The objective is not to maximize hardware capability, but to minimize total system burden while still meeting latency, throughput, reliability, maintainability, and field-update requirements.
| Platform | Best-fit workloads | Latency profile | Power profile | Development complexity | Field update complexity | Strengths | Main limitations |
|---|---|---|---|---|---|---|---|
| MCU-only endpoint | Low-rate sensing, simple threshold logic, basic actuation, narrow control loops | Low latency for simple local rules, but limited parallelism | Usually the lowest-power option | Lowest | Lowest | Cheap, efficient, simple, long battery life, easy to deploy at scale | Limited concurrency, weaker streaming performance, less suitable for heavy preprocessing or multi-channel deterministic pipelines |
| FPGA edge node | Multi-channel streaming capture, deterministic filtering, feature extraction, local hardware control | Very low and highly deterministic | Higher than MCU, but potentially efficient for continuous parallel workloads | High | Moderate to high | Parallelism, deterministic timing, streaming pipelines, reconfigurability, strong local control behavior | Harder verification, heavier toolchains, higher engineering cost, potentially excessive for simple sensing |
| Linux + FPGA gateway | Protocol translation, local buffering, accelerated preprocessing, site orchestration, field gateway logic | Low for hardware pipelines; higher software overhead outside the fabric | Highest of the three, but justified for richer workloads | Highest | High | Combines deterministic hardware paths with software flexibility, storage, networking, and remote management | Higher idle/platform power, more complex integration, greater maintenance and update burden |
The engineering implication is straightforward. MCU-only designs are preferred by default when sensing is simple and timing constraints are modest. FPGA edge nodes are justified when concurrency, streaming signal processing, and deterministic control behavior become central. Linux-plus-FPGA gateways are justified when the design also requires richer communications, storage, orchestration, remote update management, or integration with broader farm-management systems.
Workload Structure in Agricultural Monitoring
Agricultural monitoring workloads vary widely. Some are slow and periodic, such as soil-moisture sampling every few minutes. Others are continuous and timing-sensitive, such as pressure monitoring in irrigation infrastructure, flow irregularity detection, pump vibration analysis, and multispectral image preprocessing in controlled environments. Many real deployments combine both classes of workload.
This matters because FPGA suitability depends on the structure of the stream. Reconfigurable logic is most useful when the system must handle repeated, parallel, predictable operations with low latency. Examples include streaming filters, calibration paths, rolling feature extraction, threshold pipelines, packet framing, time alignment, and local rule evaluation. These operations can be implemented in software, but an FPGA can implement them as concurrent hardware data paths.
Slow environmental variables do not automatically require FPGA logic. Soil moisture, air temperature, or humidity may be sampled at low rates and processed easily by an MCU. But a greenhouse system with multiple climate sensors, fan controls, irrigation lines, light sensors, and local alarms may benefit from a more structured edge architecture. A pump-monitoring system that combines pressure, flow, current, and vibration may also justify hardware pipelines if failure detection requires predictable timing.
The workload’s communication pattern matters as much as its compute load. A system that captures high-rate raw signals but only needs to transmit anomaly summaries may benefit from edge preprocessing. A system that must preserve raw data for regulatory or scientific reasons may need local buffering and selective upload rather than aggressive filtering. FPGA architecture should therefore be tied to the actual information lifecycle: capture, process, summarize, decide, store, transmit, and audit.
The engineering question is not “Are FPGAs powerful?” The question is whether the monitoring workload is concurrent enough, timing-sensitive enough, and communication-constrained enough for hardware pipelines to produce a meaningful systems benefit.
Three-Layer Architecture for FPGA Environmental Monitoring
A practical agricultural monitoring system can be described in three layers: the sensor and actuator layer, the FPGA-based edge node, and the gateway or cloud-integration layer. This architecture clarifies what the FPGA should and should not do.
The sensor and actuator layer includes soil, climate, water, flow, vibration, nutrient, pressure, and imaging sensors. It also includes valves, pumps, relays, fans, shutters, dosing controls, lights, and field-warning devices. This layer touches the physical system directly, which means it must be robust against electrical noise, moisture, dust, corrosion, cable degradation, and installation variability.
The FPGA-based edge node handles signal capture, interface timing, filtering, calibration, feature extraction, rule evaluation, and low-latency actuation logic. Its job is to make signals more structured, more timely, and more actionable before they leave the field. It should not absorb every software function simply because it is capable. It should handle the parts of the pipeline where deterministic hardware behavior creates real value.
The gateway, network, and cloud layer manages communications, storage, analytics, remote configuration, security updates, visualization, and integration with farm-management systems. This layer may include Linux-capable processors colocated with FPGA fabric on adaptive SoCs. It is where human operators, dashboards, configuration systems, and longer-term analytics usually interact with the field network.
This layered approach helps prevent design confusion. The FPGA is not replacing the whole digital stack. It occupies the middle layer between the physical environment and higher-level software systems. Its purpose is to stabilize, reduce, and accelerate field signal processing so that the rest of the system receives better information with lower burden.
Sustainable agricultural monitoring depends on this division of labor. Sensors capture reality, FPGA logic makes real-time field signals usable, gateways coordinate and communicate, and upstream systems support planning, analytics, and governance.
Sensor Front-End and Data Acquisition
The front end of an agricultural FPGA node must support heterogeneous acquisition. Soil and nutrient probes may arrive through ADC channels or digital buses. Weather instruments may use I²C, SPI, UART, RS-485, pulse counting, or frequency outputs. Flow meters and encoders may require precise event timing. Camera or multispectral modules may introduce much higher-bandwidth data streams. A credible design begins by mapping these interface requirements explicitly.
What matters is not just reading devices, but synchronizing them and preserving timing relationships. Agricultural systems often need multiple channels sampled together, normalized, calibrated, and prepared for later processing. FPGAs are attractive here because they can implement interfaces concurrently with deterministic timing instead of relying on software polling or interrupt-heavy CPU service routines.
Analog-front-end design is also important. Sensor accuracy depends on excitation stability, ADC selection, filtering, shielding, grounding, cable routing, temperature compensation, and calibration procedure. An FPGA cannot repair poor measurement discipline upstream. Hardware data paths are only as good as the signals they receive. Agricultural environments make this especially important because cables are long, conditions are wet, and sensors drift.
Timestamping is another critical feature. Environmental data often becomes more useful when measurements can be aligned across channels: moisture, flow, pressure, valve state, pump vibration, rainfall, temperature, and irrigation schedules. A deterministic capture pipeline can preserve those relationships, making later analysis more reliable.
The sensor front end is therefore not a secondary detail. It is where physical conditions become digital evidence. A strong FPGA monitoring design treats acquisition as an engineered measurement system rather than as a loose collection of sensor reads.
Signal Conditioning, Filtering, and Feature Extraction in Hardware
Raw agricultural signals are rarely clean. Soil probes drift with temperature, salinity, and soil composition. Water-quality measurements fluctuate. Pressure and flow traces may be noisy. Vibration sensors can capture pump behavior, bearing wear, cavitation, and ordinary mechanical noise at the same time. Environmental signals often require smoothing, calibration, thresholding, or feature extraction before they become operationally useful.
This is one of the clearest places where FPGA logic can justify itself. Streaming filters, moving averages, rolling windows, frequency estimates, pulse counters, threshold pipelines, and simple feature extractors are highly repetitive operations that map naturally to hardware data paths. Implementing them in the fabric can reduce CPU burden and make processing latency predictable.
Hardware filtering is especially valuable when multiple channels must be processed at once. A CPU may handle one stream well but become less predictable as channels, interrupts, and background tasks grow. An FPGA can allocate dedicated logic to several paths, allowing acquisition and preprocessing to continue in parallel.
Feature extraction can also reduce communication burden. Instead of transmitting thousands of raw samples, a node can transmit pressure-event counts, vibration peaks, rolling variance, moisture trends, threshold-crossing events, and confidence scores. These features may be enough for irrigation control, pump monitoring, or greenhouse management while requiring much less bandwidth.
The key point is not that simple filters are difficult in software. The key point is that agricultural monitoring often needs repeated, predictable, multi-channel processing under field constraints. Hardware signal paths can make that processing more deterministic, lower-latency, and less dependent on software scheduling behavior.
Local Control Loops for Irrigation, Ventilation, and Water Systems
Agricultural monitoring becomes significantly more valuable when it can support local action. In many settings, the purpose of sensing is not simply to report conditions but to trigger irrigation, adjust greenhouse ventilation, protect pumps, regulate dosing, or enforce water-quality rules. Those actions often need to remain available even when network connectivity is degraded.
This is where reconfigurable edge hardware becomes especially useful. An FPGA can implement local threshold logic, hysteresis, debounce behavior, timing windows, safe-state rules, and deterministic state transitions without depending on an operating system or remote service. That makes field behavior more predictable and more resilient.
Irrigation control is a strong example. Soil moisture alone may not determine action. A system may also need pressure, flow, pump state, rainfall forecast, valve status, line faults, and minimum rest intervals. Some of this logic may live in software, but the safety-critical or latency-sensitive portion can be implemented in hardware so that basic protective behavior persists even if the gateway becomes unavailable.
Greenhouse systems also benefit from local control loops. Temperature, humidity, CO₂, light, fan state, vent position, and irrigation status interact continuously. If a remote service becomes unavailable, the greenhouse still needs local behavior that prevents damaging heat, humidity stress, or ventilation failure. FPGA logic can support deterministic low-level control while higher layers optimize strategy.
Local control should not be confused with full autonomy. A responsible architecture separates immediate safety and field-response logic from higher-level planning. The FPGA can enforce protective thresholds and deterministic actuation behavior, while software and cloud systems handle configuration, scheduling, analytics, and long-term optimization.
Resource Budgeting, Fixed-Point Arithmetic, and Timing Closure
Most agricultural edge-monitoring workloads do not need floating-point arithmetic in the fabric. Fixed-point representations are usually the better choice because they reduce DSP pressure, simplify pipelines, and improve timing closure. That means the engineering task is not only selecting an algorithm, but also selecting a numeric representation: word length, fractional precision, saturation behavior, and acceptable quantization error all matter.
Resource budgeting should be explicit. A serious design should account for LUTs, flip-flops, DSP slices, BRAM, clock-domain structure, memory bandwidth, DMA paths, and timing slack. FPGA designs fail not only when algorithms are wrong, but when timing closure is fragile, numeric precision is inadequate, or resource use leaves no margin for future sensor expansion.
Pipeline latency should also be documented. In agricultural systems, a few extra cycles may not matter for slow soil sensing, but they may matter for pump protection, high-rate vibration analysis, or fast greenhouse control. A design should specify cycles from sensor-valid input to control-valid output or feature-valid output, then verify that latency against the operational requirement.
Numeric error deserves special attention because field sensors are noisy and often drift. Fixed-point scaling must preserve enough precision to distinguish meaningful changes from measurement noise. Saturation behavior should be deliberate. Accumulators should be wide enough to avoid overflow. Calibration constants should be represented consistently. A design that saves resources by using too little precision may degrade the usefulness of the entire monitoring system.
This is one of the main differences between a good technical overview and a true engineering reference. Serious FPGA practice requires resource, timing, numeric, and verification properties to be measured and documented rather than assumed.
Linux, PYNQ, and Reconfigurable Edge Gateways
Some agricultural deployments need more than a fabric-only node. They need buffering, secure connectivity, configuration management, local storage, protocol translation, remote updates, and integration with farm-management systems. In those cases, Linux-capable gateways paired with reconfigurable logic often make more sense than either pure MCU systems or pure hardware pipelines.
PYNQ is useful in this context because it lowers the barrier to prototyping and integration on Zynq-class systems. It makes it easier to test overlays, DMA-backed data paths, and accelerated signal pipelines from Python without discarding the underlying hardware architecture. That matters when teams need to move between hardware acceleration, data analysis, and edge orchestration quickly.
A good Linux-plus-FPGA architecture separates responsibilities clearly. The FPGA fabric handles repeated dataflow work: capture, filtering, timestamping, feature extraction, thresholding, and latency-sensitive control paths. The Linux side handles configuration, storage, network protocols, security services, logging, remote management, and integration with higher-level applications.
This division of labor prevents two common errors. The first is pushing too much into Linux and losing deterministic behavior. The second is pushing too much into FPGA logic and making the system difficult to maintain. A balanced reconfigurable gateway uses hardware where parallelism and determinism matter, and software where flexibility and integration matter.
Power still matters. Linux-capable gateways have higher idle power than MCU endpoints. They should be used when their capabilities are necessary, not as default replacements for simpler nodes. In sustainable agriculture, the right gateway is one that improves field reliability and data usefulness enough to justify its energy and maintenance burden.
TinyML, Lightweight Inference, and FPGA Preprocessing
Not all inference in agriculture belongs in the same place. In many cases, the smartest use of an FPGA is not to force an entire model into logic, but to let the FPGA perform denoising, windowing, feature extraction, compression, or stream alignment before a lightweight classifier runs on a processor or MCU.
This architecture is often more practical than putting every stage into one compute substrate. FPGA preprocessing reduces data volume and CPU burden. Lightweight inference then classifies irrigation anomalies, greenhouse instability, vibration faults, flow irregularities, or water-quality changes using structured features rather than raw streams. Heavier analytics remain upstream where more compute and storage are available.
The sustainability value comes from reducing unnecessary communication and compute. If feature extraction on the edge allows the system to transmit a small event packet rather than a raw stream, total burden may fall. If local classification prevents false alarms and unnecessary service visits, the operational benefit can exceed the direct energy savings.
But lightweight inference also introduces risk. Models can drift, sensors can degrade, and local classifications can fail silently if monitoring is weak. Agricultural systems are seasonal, heterogeneous, and exposed to changing environmental conditions. A model trained on one soil type, pump behavior, crop regime, or greenhouse configuration may not generalize perfectly to another.
For that reason, FPGA preprocessing and lightweight inference should be designed with observability. Systems should retain enough raw or semi-processed evidence for calibration, auditing, and model improvement. Local intelligence is most valuable when it reduces burden without hiding important field behavior from human review.
Verification, Validation, and Field Acceptance
An FPGA agricultural monitoring design should be verified at multiple levels. Module-level verification tests capture modules, filters, threshold logic, framing, and control blocks in isolation. System-level verification tests DMA paths, gateway software, actuator interfaces, watchdog behavior, communication logic, and failure recovery. Hardware-in-the-loop validation replays recorded field signals, injected faults, and timing stress under realistic operating conditions.
Field acceptance testing is especially important in agriculture because real field conditions often differ from bench assumptions. Sensor drift, enclosure effects, cable behavior, water ingress, corrosion, insects, unstable power, temperature swings, and installation differences can create discrepancies that do not appear in simulation. A system that passes RTL simulation may still fail as an agricultural instrument if field validation is weak.
Verification should also include fault behavior. What happens if a sensor disconnects? What happens if the ADC saturates? What happens if a pulse input chatters? What happens if an actuator fails to respond? What happens if the network is unavailable for days? What happens if a firmware update fails halfway? Agricultural systems require designed failure behavior, not just designed normal behavior.
Timing should be verified after synthesis and place-and-route, not only at the conceptual level. Fixed-point behavior should be tested against reference models. Control thresholds should be tested under noisy inputs. Packet framing should be tested under buffer pressure. PYNQ and Linux integration should be tested for memory-transfer correctness, service restarts, and recovery after power loss.
A strong FPGA agricultural monitoring system is therefore not validated by a successful demo alone. It is validated by evidence that the system behaves correctly under the messy, degraded, intermittent, and environmentally stressed conditions that real agriculture produces.
Worked Deployment Profile: Irrigation and Pump Monitoring Node
Consider a field node that monitors soil moisture, line pressure, flow, and pump vibration for a single irrigation block. A sensible split of responsibilities begins with the sensor front end: ADC-connected soil and pressure channels, pulse-based flow sensing, and vibration input through a conditioned analog path. These inputs are physically different, but the node must align them into one coherent operational picture.
The FPGA fabric can handle timestamping, moving-average filtering, threshold windows, vibration feature extraction, flow irregularity checks, and irrigation-rule evaluation. This gives the system a deterministic local layer capable of detecting line pressure anomalies, pump vibration peaks, low-flow conditions, or moisture thresholds without waiting for a cloud service.
The processor or gateway layer can handle event logging, uplink packaging, configuration updates, security services, and cloud synchronization. This keeps higher-level management in software while preserving low-latency local behavior in hardware. It also allows remote operators to update thresholds, review events, and download summaries without requiring raw continuous streams to be transmitted constantly.
In this deployment, the FPGA should reduce uplink payload from raw continuous streams to structured events and periodic summaries. The advantage is not only speed. The system remains capable of local action even if the network is unavailable, and it sends upstream only the information that must actually be stored, visualized, audited, or acted upon.
This kind of deployment pattern is where FPGA environmental monitoring becomes genuinely compelling. It solves a specific systems problem: how to keep irrigation and pump monitoring responsive, efficient, and locally robust while reducing communication burden and preserving enough data for higher-level management.
Power, Ruggedization, and Field Deployment Constraints
Agricultural edge systems operate in difficult environments. Heat, dust, moisture, vibration, unstable power, long cable runs, corrosion, insects, enclosure failure, and seasonal weather all shape what hardware is viable. FPGA environmental monitoring should therefore never be treated as a datacenter acceleration concept transplanted thoughtlessly into the field.
Power is one of the central constraints. For simple workloads, a microcontroller remains the better choice. But where multiple continuous streams, timing precision, and low-latency local processing become important, a reconfigurable device may justify itself by reducing communication burden, consolidating tasks, or improving edge responsiveness. The power question must be evaluated over the whole system: sensing, processing, communication, idle behavior, local storage, update cycles, and maintenance visits.
Ruggedization matters just as much. Real deployments need enclosures, cable strain relief, surge protection, interface isolation, watchdog strategies, power conditioning, safe-state behavior, update rollback, and tolerance for environmental abuse. A technically credible agricultural design has to account for those conditions explicitly.
Field maintenance is also part of the design. A system that requires frequent manual intervention may fail economically even if it works technically. Agricultural operations often have limited time, uneven technical support, and seasonal urgency. Monitoring infrastructure should be designed so that routine operation is simple, failure modes are visible, and servicing can be performed without specialized intervention whenever possible.
Deployment constraints therefore shape architecture. The best FPGA design is not the one with the most impressive hardware pipeline. It is the one that survives the field, communicates what matters, protects local systems, and remains maintainable across seasons.
Trade-Offs, Cost, and Maintainability
FPGAs have real costs. Development is more complex. Verification takes longer. Toolchains are heavier. Field updates require disciplined rollback and configuration control. Engineers must manage timing closure, fixed-point representation, HDL design, software integration, power behavior, and hardware-debug complexity. For modest agricultural sensing tasks, MCU-based systems will often remain cheaper and easier to maintain.
This is why the decision rule matters so much. Reconfigurable hardware is most justified when parallel signal streams, deterministic timing, local actuation, evolving requirements, or heavy preprocessing needs create enough technical pressure that software-only designs begin to look inefficient or fragile. The FPGA should be solving a problem that matters operationally.
Cost should also be evaluated over the deployment lifecycle rather than only through board price. A more expensive FPGA node may be justified if it reduces service trips, prevents pump failures, lowers communication cost, extends system life, or supports multiple evolving workloads without hardware replacement. Conversely, a cheaper hardware choice may be more sustainable if the task is simple and the fleet can be maintained easily.
Maintainability is often the decisive issue. A farm or irrigation district needs systems that can be diagnosed, updated, repaired, and trusted. If FPGA complexity creates dependence on a small number of specialists or a fragile toolchain, the design may be less sustainable than a simpler architecture. Reconfigurability is valuable only when it remains operationally manageable.
The right question is not whether FPGAs are powerful. The right question is whether a given agricultural workload benefits enough from hardware parallelism, determinism, and reconfigurability to offset the added engineering cost.
Why FPGA Hardware Alone Is Not Enough
It is not enough to add FPGA hardware to an agricultural monitoring system and call it smart. Reconfigurable logic can improve deterministic processing, local control, and data reduction, but it cannot compensate for poor sensing, weak calibration, bad enclosure design, unreliable power, insecure updates, missing maintenance planning, or unclear operational requirements.
This matters because agricultural technology is often oversold through hardware novelty. A monitoring system can include advanced silicon and still fail if soil probes drift, cables corrode, water enters enclosures, thresholds are poorly configured, field users cannot interpret alerts, or connectivity assumptions are unrealistic. The value of an FPGA depends on the quality of the whole system around it.
FPGA hardware also cannot replace agronomic understanding. Irrigation control, water-quality monitoring, greenhouse management, and crop protection all depend on local conditions, crop type, soil structure, climate, water availability, labor constraints, and farmer decision-making. A technically elegant monitoring system may still be useless if it does not align with agricultural practice.
Nor can FPGA acceleration solve governance problems by itself. Data ownership, privacy, maintenance responsibility, repair rights, vendor lock-in, and the cost of long-term support all shape whether smart agriculture strengthens farmers and local institutions or creates new dependencies. Sustainable agricultural monitoring requires accountable systems, not only efficient pipelines.
The deeper goal is therefore not FPGA adoption as a technology marker, but reliable field intelligence. Reconfigurable edge hardware is valuable when it improves measurement quality, control resilience, communication efficiency, and maintainability. It is excessive when it adds complexity without improving the agricultural system’s real capacity to learn, adapt, and act.
Why This Matters for Sustainable Development
FPGA environmental monitoring matters for sustainable development because agricultural resilience increasingly depends on the quality of sensing, control, and local response in real physical systems. Water scarcity, soil stress, irrigation inefficiency, climate volatility, energy constraints, and infrastructure fragility all require better field intelligence. But better intelligence does not come from raw data alone. It comes from systems capable of turning measurements into timely, reliable, and actionable information.
This is why reconfigurable edge hardware deserves careful treatment. It reveals a central truth about smart agriculture: digital transformation is only useful when it fits the physics, timing, labor, power, and maintenance realities of the field. FPGA systems can help where concurrent sensing, deterministic control, and communication reduction are essential. They can also become unnecessary complexity where simpler devices would do the job better.
The issue is also one of responsible technology transfer. Agricultural systems vary dramatically across regions, farm sizes, climates, institutions, and resource constraints. A technology that works in a high-capital greenhouse may be inappropriate for smallholder irrigation. A hardware platform that reduces water loss in one context may be too expensive or maintenance-heavy in another. Sustainable development requires technology choices that fit local capacity, not only technical possibility.
To take FPGA environmental monitoring seriously is therefore to take agricultural infrastructure seriously. It is to recognize that food systems increasingly depend on embedded intelligence, but that intelligence must be designed around sufficiency, resilience, maintainability, and field relevance.
Development becomes credible when smart agriculture improves water stewardship, reduces avoidable loss, supports local decision-making, protects infrastructure, and keeps data processing close enough to the field to remain useful when connectivity, power, or upstream services fail.
Mathematical Lens
FPGA environmental monitoring can be represented as a throughput-and-latency optimization problem under field constraints. Let \(B\) denote monitoring burden, \(L\) latency, \(P\) power, \(C\) communication load, and \(R\) reconfiguration value:
B = \alpha L + \beta P + \gamma C – \delta R
\]
Interpretation: Monitoring burden falls when latency, power, and communication load are reduced, while reconfiguration value improves the system’s ability to adapt across seasons, crops, sensors, and control requirements.
The objective is not to minimize one variable in isolation. A very low-latency system may be too power-hungry. A very low-power system may fail to respond quickly enough. A highly reconfigurable system may be too expensive or difficult to maintain. The design challenge is to reduce total burden under real agricultural constraints.
For a streaming edge pipeline, data-reduction benefit can be expressed as:
G = S_{\text{raw}} – S_{\text{processed}}
\]
Interpretation: Edge-processing gain increases when raw-stream data volume is converted into smaller feature-level or filtered outputs before transmission.
This relationship matters because communication is often one of the most expensive operations in remote sensing. A system that reduces transmitted data while preserving decision usefulness can lower radio energy, backhaul cost, storage burden, and upstream compute demand.
Local-response timing can be represented as:
T_{\text{decision}} = T_{\text{capture}} + T_{\text{filter}} + T_{\text{rule}}
\]
Interpretation: Deterministic hardware pipelines are valuable when capture, filtering, and rule evaluation must produce predictable local response times.
This is especially important in irrigation, greenhouse, and water-control applications where response time is operationally significant.
Finally, platform selection can be expressed as a constrained optimization problem:
\min_{k \in \{m,f,g\}} B_k
\quad \text{subject to} \quad
L_k \leq L_{\max},\; P_k \leq P_{\max},\; Q_k \geq Q_{\min}
\]
Interpretation: Choose the least burdensome platform only if it satisfies maximum latency, maximum power, and minimum quality requirements.
Here, \(m\) represents MCU-only endpoints, \(f\) FPGA edge nodes, and \(g\) Linux-plus-FPGA gateways. \(Q\) represents measurement quality, control quality, or decision quality. The value of this formulation is that it prevents overbuilding: the most capable platform is not necessarily the most sustainable platform.
| Term | Meaning | Interpretive role |
|---|---|---|
| \(B\) | Monitoring burden | Represents combined latency, power, communication, complexity, and field overhead. |
| \(L\) | Latency | Represents time from signal capture to decision or control response. |
| \(P\) | Power | Represents active, idle, and deployment energy burden. |
| \(C\) | Communication load | Represents raw or processed data transmitted upstream. |
| \(R\) | Reconfiguration value | Represents the benefit of adapting hardware behavior across changing agricultural requirements. |
| \(G\) | Edge-processing gain | Represents the reduction from raw-stream data to processed data. |
| \(T_{\text{decision}}\) | Local decision time | Represents the total time required for capture, filtering, and rule evaluation. |
The equations are conceptual rather than predictive. Their value is to make visible the structure of the design problem: FPGA monitoring contributes to sustainable agriculture only when latency, power, communication, reconfigurability, reliability, and maintainability are evaluated together.
Verilog Workflow: Sensor Capture, Filtering, and Local Irrigation Logic
The following Verilog snippets illustrate a compact FPGA monitoring chain: sensor capture, moving-average filtering, and local irrigation control. These examples are intentionally small, but they show the design logic clearly. The fabric captures a stream, filters it deterministically, and applies a local rule without waiting for a remote system.
module sensor_capture #(
parameter ADC_WIDTH = 12
)(
input wire clk,
input wire rst_n,
input wire [ADC_WIDTH-1:0] adc_sample,
input wire adc_valid,
output reg [15:0] sample_count,
output reg [ADC_WIDTH-1:0] latest_sample
);
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
sample_count <= 16'd0;
latest_sample <= {ADC_WIDTH{1'b0}};
end else if (adc_valid) begin
latest_sample <= adc_sample;
sample_count <= sample_count + 16'd1;
end
end
endmodule
module moving_average_4 (
input wire clk,
input wire rst_n,
input wire [15:0] sample_in,
input wire valid_in,
output reg [15:0] avg_out,
output reg valid_out
);
reg [15:0] s0, s1, s2, s3;
wire [17:0] sum_now;
assign sum_now = s0 + s1 + s2 + s3;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
s0 <= 16'd0;
s1 <= 16'd0;
s2 <= 16'd0;
s3 <= 16'd0;
avg_out <= 16'd0;
valid_out <= 1'b0;
end else if (valid_in) begin
s3 <= s2;
s2 <= s1;
s1 <= s0;
s0 <= sample_in;
avg_out <= sum_now[17:2];
valid_out <= 1'b1;
end else begin
valid_out <= 1'b0;
end
end
endmodule
module irrigation_rule (
input wire clk,
input wire rst_n,
input wire [15:0] soil_moisture,
input wire [15:0] threshold_low,
input wire [15:0] threshold_high,
output reg valve_open
);
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
valve_open <= 1'b0;
end else begin
if (soil_moisture < threshold_low) begin
valve_open <= 1'b1;
end else if (soil_moisture > threshold_high) begin
valve_open <= 1'b0;
end
end
end
endmodule
The technical point is not that these individual modules are difficult to implement in software. The point is that FPGA logic can run this class of operation continuously, deterministically, and in parallel with other processing paths. That makes the fabric valuable where field systems require predictable signal behavior and local control under imperfect connectivity.
Advanced Python Workflow: Sensor Pipeline and Edge Throughput Modeling
This Python workflow compares raw versus edge-processed agricultural sensor streams and estimates how much communication burden can be reduced through FPGA-side preprocessing. It also computes local decision time and a simple efficiency score that relates saved bandwidth to power budget.
from __future__ import annotations
import pandas as pd
INPUT_FILE = "fpga_agriculture_sensor_panel.csv"
OUTPUT_FILE = "fpga_agriculture_sensor_pipeline_results.csv"
# Expected columns:
# node_name, raw_samples_per_sec, bytes_per_sample,
# edge_reduction_ratio, local_processing_latency_ms,
# uplink_latency_ms, power_budget_mw
def load_data(path: str) -> pd.DataFrame:
"""Load agricultural sensor-pipeline scenarios from a CSV file."""
df = pd.read_csv(path)
required = [
"node_name",
"raw_samples_per_sec",
"bytes_per_sample",
"edge_reduction_ratio",
"local_processing_latency_ms",
"uplink_latency_ms",
"power_budget_mw",
]
missing = [col for col in required if col not in df.columns]
if missing:
raise ValueError(f"Missing required columns: {missing}")
return df
def validate_inputs(df: pd.DataFrame) -> pd.DataFrame:
"""Validate that modeling inputs are complete and physically meaningful."""
numeric_columns = [
"raw_samples_per_sec",
"bytes_per_sample",
"edge_reduction_ratio",
"local_processing_latency_ms",
"uplink_latency_ms",
"power_budget_mw",
]
for col in numeric_columns:
if df[col].isna().any():
raise ValueError(f"Column '{col}' contains missing values.")
if (df[col] < 0).any():
raise ValueError(f"Column '{col}' contains negative values.")
if (df["edge_reduction_ratio"] > 1).any():
raise ValueError("edge_reduction_ratio must be between 0 and 1.")
if (df["power_budget_mw"] == 0).any():
raise ValueError("power_budget_mw must be greater than zero.")
return df
def compute_metrics(df: pd.DataFrame) -> pd.DataFrame:
"""Compute raw rate, processed rate, data savings, and decision latency."""
df = df.copy()
df["raw_bytes_per_sec"] = (
df["raw_samples_per_sec"] *
df["bytes_per_sample"]
)
df["processed_bytes_per_sec"] = (
df["raw_bytes_per_sec"] *
(1 - df["edge_reduction_ratio"])
)
df["bytes_saved_per_sec"] = (
df["raw_bytes_per_sec"] -
df["processed_bytes_per_sec"]
)
df["decision_time_ms"] = (
df["local_processing_latency_ms"] +
df["uplink_latency_ms"]
)
df["efficiency_score"] = (
df["bytes_saved_per_sec"] /
df["power_budget_mw"]
)
return df
def main() -> None:
df = load_data(INPUT_FILE)
df = validate_inputs(df)
results = compute_metrics(df)
results.to_csv(OUTPUT_FILE, index=False)
print("FPGA agricultural edge-pipeline modeling complete.")
print(results.to_string(index=False))
if __name__ == "__main__":
main()
This workflow is intentionally transparent. It does not claim to model every detail of FPGA power or agricultural communication behavior. Its purpose is to make early design assumptions visible: raw data rate, edge-reduction ratio, latency, and power budget. Real deployments should still be measured on hardware because radio conditions, sensor noise, gateway behavior, and field power supply can change actual performance.
Advanced R Workflow: Field Fleet Burden and Agricultural Service Overhead
This R workflow compares agricultural monitoring deployments across service frequency, communication burden, field-maintenance overhead, local processing gain, and failure rates. It is designed to shift analysis from the single-node question to the fleet-level infrastructure question.
library(readr)
library(dplyr)
input_file <- "fpga_agriculture_fleet_panel.csv"
output_file <- "fpga_agriculture_fleet_summary.csv"
# Expected columns:
# scenario_name, fleet_size, service_visits_per_year,
# service_trip_cost_index, average_backhaul_load_mb_day,
# local_processing_gain_index, annual_failure_rate
fleet_df <- read_csv(input_file, show_col_types = FALSE)
required_cols <- c(
"scenario_name",
"fleet_size",
"service_visits_per_year",
"service_trip_cost_index",
"average_backhaul_load_mb_day",
"local_processing_gain_index",
"annual_failure_rate"
)
missing_cols <- setdiff(required_cols, names(fleet_df))
if (length(missing_cols) > 0) {
stop(paste("Missing required columns:", paste(missing_cols, collapse = ", ")))
}
numeric_cols <- setdiff(required_cols, "scenario_name")
invalid_numeric_cols <- numeric_cols[
vapply(
fleet_df[numeric_cols],
function(x) any(is.na(x) | x < 0),
logical(1)
)
]
if (length(invalid_numeric_cols) > 0) {
stop(
paste(
"Numeric columns must be complete and non-negative:",
paste(invalid_numeric_cols, collapse = ", ")
)
)
}
summary_df <- fleet_df %>%
mutate(
service_burden = (
fleet_size *
service_visits_per_year *
service_trip_cost_index
),
network_burden = (
fleet_size *
average_backhaul_load_mb_day
),
failure_burden = (
fleet_size *
annual_failure_rate
),
local_processing_benefit = (
fleet_size *
local_processing_gain_index
),
overall_burden_proxy = (
service_burden +
network_burden +
failure_burden -
local_processing_benefit
)
) %>%
arrange(desc(overall_burden_proxy))
write_csv(summary_df, output_file)
cat("FPGA agriculture fleet summary exported to:", output_file, "\n")
print(summary_df)
This workflow helps distinguish device-level performance from infrastructure-level sustainability. A design that saves bandwidth or reduces local decision time may still be weak if it increases service visits, failure rates, or maintenance complexity. Conversely, a more complex FPGA node may be justified if it reduces backhaul load, prevents equipment failures, and lowers field-service burden at fleet scale.
GitHub Repository
Complete Code Repository
The full code distribution for this article, including RTL examples, PYNQ edge scaffolding, sensor-pipeline modeling, agricultural fleet analysis, verification scaffolding, supporting documentation, and repository structure, is available on GitHub.
Related Articles
- Energy-Efficient Embedded Systems for Sustainable Digital Infrastructure
- Digital Infrastructure and Development Capacity
- Environmental Monitoring Systems
- Embedded and Edge Systems
- Water, Sanitation, and Public Infrastructure Systems
- Freshwater Change and Development Risk
- Climate Change as a Development Constraint
- Innovation, Technology Transfer, and Leapfrogging
- Local Governance, Cities, and Territorial Development
- Planetary Boundaries and Sustainable Development
Further Reading
- AMD (n.d.) Adaptive SoCs and FPGAs. Available at: https://www.amd.com/en/products/adaptive-socs-and-fpgas.html
- Altera (n.d.) FPGAs. Available at: https://www.altera.com/fpga
- PYNQ Documentation (v3.1) (n.d.) PYNQ.remote. Available at: https://pynq.readthedocs.io/en/v3.1/pynq_remote.html
- Linux Kernel Documentation (n.d.) CPU Performance Scaling. Available at: https://docs.kernel.org/admin-guide/pm/cpufreq.html
- FAO TECA (n.d.) Technologies and practices for sustainable agriculture. Available at: https://teca.apps.fao.org/teca/
References
- AMD (n.d.) Adaptive SoCs and FPGAs. Available at: https://www.amd.com/en/products/adaptive-socs-and-fpgas.html
- Altera (n.d.) FPGAs. Available at: https://www.altera.com/fpga
- PYNQ Documentation (v3.1) (n.d.) PYNQ.remote. Available at: https://pynq.readthedocs.io/en/v3.1/pynq_remote.html
- Linux Kernel Documentation (n.d.) CPU Performance Scaling. Available at: https://docs.kernel.org/admin-guide/pm/cpufreq.html
- FAO TECA (n.d.) TECA platform. Available at: https://teca.apps.fao.org/teca/