
Last Updated May 7, 2026
Energy-efficient embedded systems are a foundational layer of sustainable digital infrastructure because edge devices determine not only instantaneous power draw, but also maintenance frequency, battery replacement burden, thermal stress, system uptime, and the long-run material footprint of distributed digital systems. Sensor nodes, smart meters, industrial controllers, environmental monitors, utility devices, agricultural telemetry systems, and intelligent gateways scale by repetition. A design decision that saves only milliwatts or a few seconds of radio-on time may look minor at the device level, but across fleets of thousands or millions of deployed systems, small energy choices become operationally and environmentally significant.
The central principle is simple: sustainable embedded infrastructure depends on choosing the lightest adequate compute tier for each task, then designing the system around duty cycling, interrupt-driven execution, memory discipline, power-state transitions, local filtering, and lifecycle efficiency. The goal is not merely to make a device “low power.” It is to make the wider digital infrastructure more durable, serviceable, reliable, and materially efficient over time.
The best way to understand embedded efficiency is as a workload-mapping problem across compute tiers. Some tasks belong on ultra-low-power microcontrollers that wake briefly, sample, classify, and return to sleep. Some belong on Linux-capable edge nodes that batch data, orchestrate protocols, manage security, and coordinate updates. Others justify acceleration on adaptive SoCs where programmable logic improves performance per joule for filtering, compression, signal processing, or selected inference paths.
This article examines energy-efficient embedded systems as infrastructure engineering. It connects Cortex-M-class low-power endpoints, TinyML inference, Linux edge power management, and PYNQ-style adaptive acceleration into one systems argument: sustainable digital infrastructure improves when every task is placed on the lowest viable compute tier, every active phase is shortened, every communication path is justified, and every maintenance cycle is treated as part of the environmental footprint.
Why This Is an Infrastructure Problem
Low-power embedded design is often discussed as a device-level optimization problem, but in practice it is an infrastructure problem. A battery-powered node in a river, field, pipeline, utility cabinet, industrial site, transport corridor, or public building is not only a piece of electronics. It is part of a larger operational system whose power profile affects maintenance, logistics, uptime, data quality, replacement frequency, and long-run material burden.
This matters because distributed digital infrastructure grows through scale. One environmental sensor, smart meter, water-quality monitor, or gateway may appear insignificant, but thousands of devices create a fleet. A fleet creates maintenance routes, battery replacement schedules, spare-parts logistics, field-service labor, waste streams, firmware-management duties, and reliability risks. Energy efficiency therefore becomes a question of operational design, not only electrical design.
A device that lasts five years instead of one year on its power source changes the infrastructure around it. Fewer site visits are required. Fewer batteries or power modules are replaced. Fewer failures occur because field maintenance is less frequent. Less staff time is consumed by routine replacement. Remote or hard-to-reach deployments become more viable. In settings such as environmental monitoring, agricultural telemetry, hydrology, water systems, and public infrastructure, this can determine whether a monitoring system is sustainable after its pilot phase ends.
This is also why embedded systems belong inside sustainable-development thinking. Digital infrastructure increasingly supports environmental monitoring, utility management, climate adaptation, industrial efficiency, agricultural resilience, early warning, public-health monitoring, and urban systems. If the edge layer is wasteful, the wider system inherits that waste. If the edge layer is designed for long-life, low-power, low-maintenance operation, it lowers both operational and material overhead across the full infrastructure stack.
Energy-efficient embedded design is therefore not a narrow engineering specialty. It is part of how digital infrastructure becomes durable enough to serve public and ecological purposes over time.
What Energy-Efficient Embedded Systems Mean
Energy-efficient embedded systems are computing systems designed to perform sensing, control, inference, communication, and coordination tasks with the least practical energy and material burden across their useful life. In embedded infrastructure, efficiency is not only about lowering the peak power of one processor. It is about minimizing total system burden across active computation, sleep current, radio transmission, memory access, thermal behavior, update overhead, maintenance visits, battery replacement, and device lifetime.
This matters because embedded systems operate under constraints that differ from desktop, cloud, or conventional application computing. Many devices are deployed remotely, powered by small batteries, solar harvesters, energy buffers, or constrained supply rails. Some must survive heat, humidity, vibration, dust, water exposure, or field conditions. Others must operate for years without human intervention. These conditions make energy design inseparable from reliability design.
Efficiency also depends on matching workload to hardware. A tiny sensor threshold check does not belong on a Linux computer if an MCU can handle it. A network gateway should not run continuously at high performance when work can be batched. A repeated filtering workload may justify hardware acceleration if it reduces CPU active time and improves performance per joule. Energy-efficient embedded design is therefore architectural: it asks where a task should run, how often it should run, how much data must move, and whether computation prevents more expensive communication or service activity elsewhere.
In sustainable digital infrastructure, embedded efficiency should be evaluated through four linked questions: Does the device minimize unnecessary energy use? Does it reduce maintenance and replacement burden? Does it preserve reliability under real deployment conditions? Does it support the wider infrastructure goal without creating avoidable material waste? A technically efficient device that fails often, requires frequent replacement, or generates hard-to-service fleets is not truly efficient in infrastructure terms.
Energy-efficient embedded systems therefore sit at the intersection of hardware design, firmware discipline, systems architecture, lifecycle analysis, and public-infrastructure reliability.
A Three-Tier Architecture for Sustainable Digital Infrastructure
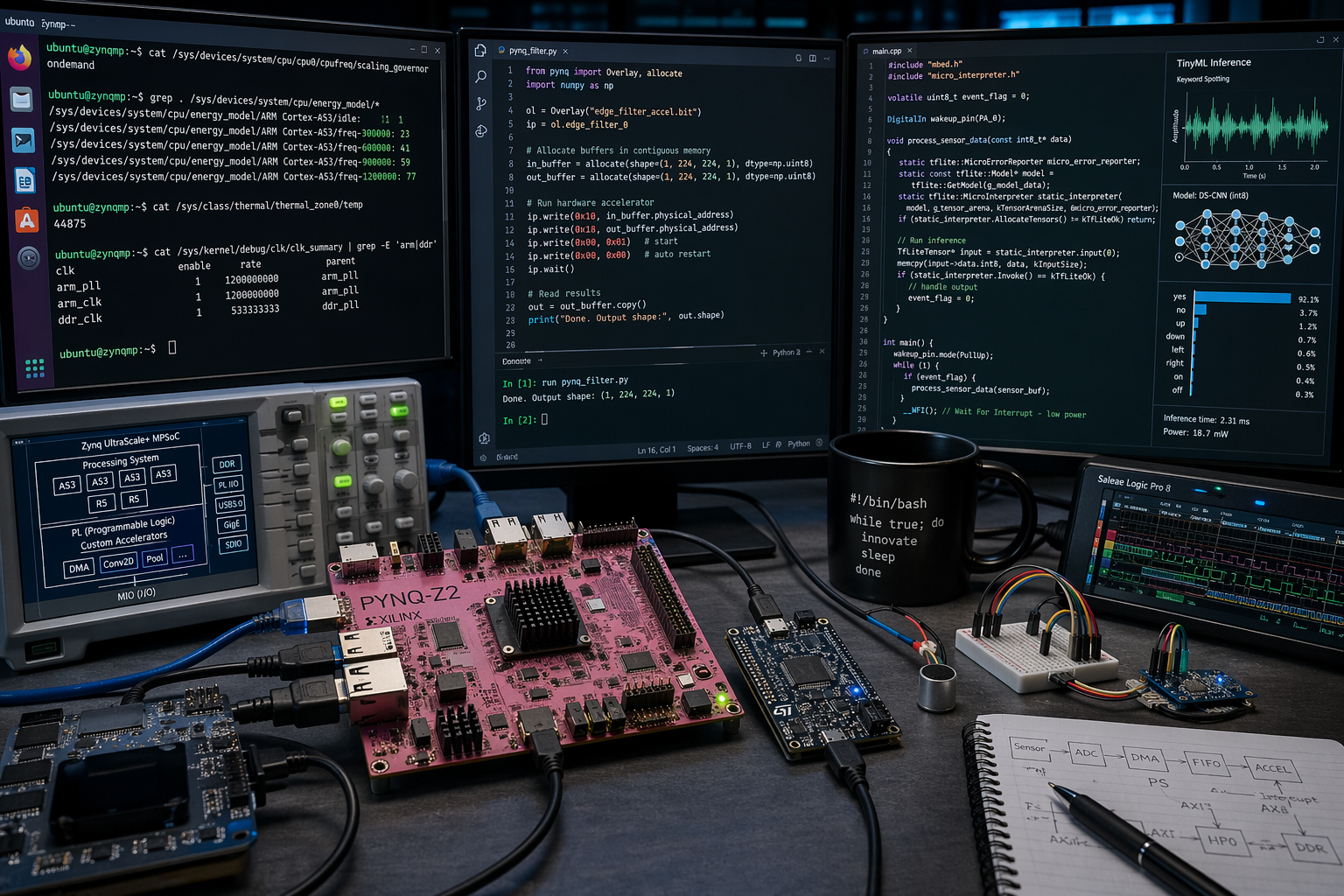
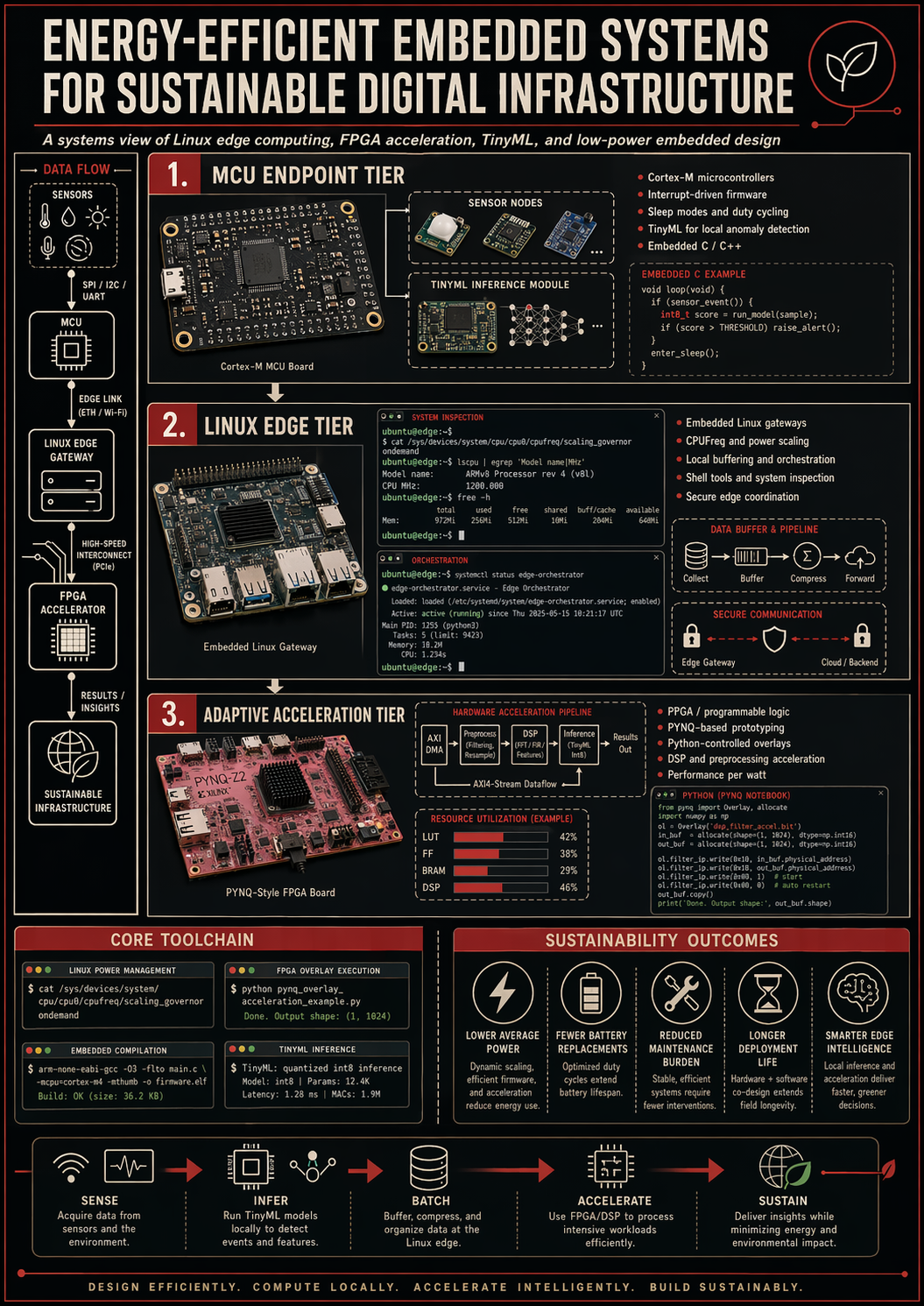
A useful way to structure sustainable embedded design is through three compute tiers: MCU endpoints, Linux edge nodes, and adaptive acceleration platforms. Each tier carries a different energy profile, software model, maintenance burden, and development role. The architectural goal is not to prefer one tier universally, but to place each workload on the lightest tier that can meet the system’s requirements.
Tier 1: MCU endpoints. These are ultra-low-power sensing and control nodes built around Cortex-M-class microcontrollers or comparable low-power devices. Their job is to remain asleep most of the time, wake on interrupt or timer, sample sensors, perform small amounts of local logic or TinyML inference, and return quickly to low-power states. This tier is ideal for always-deployed, low-data-rate, long-life field devices.
Tier 2: Linux edge nodes. These devices support richer networking, local buffering, secure connectivity, protocol translation, device orchestration, and sometimes heavier preprocessing. Linux provides flexibility, but that flexibility carries higher idle and baseline power costs. CPUFreq, Energy Aware Scheduling, suspend states, device-tree configuration, peripheral shutdown, and batch-oriented service design matter because Linux systems can easily become overprovisioned for tasks that simpler devices could handle.
Tier 3: adaptive acceleration. These are platforms where programmable logic, FPGA fabric, or specialized acceleration blocks are justified because repeated DSP, filtering, packet processing, compression, or inference-adjacent workloads can be executed more efficiently than on a general-purpose CPU. PYNQ is useful in this layer because it provides a Python-first workflow for working with adaptive-computing platforms, overlays, DMA buffers, and host-side interaction with accelerators.
This tiered approach matters because sustainability improves when workloads are pushed as far down the power stack as possible without violating latency, reliability, security, or maintainability constraints. A gateway should not do what a sensor can do locally. A cloud service should not receive raw data that a small classifier can discard safely at the endpoint. An FPGA accelerator should not be used because it is impressive; it should be used because the workload justifies its power, complexity, and development overhead.
Sustainable digital infrastructure emerges from this discipline of proportionality. The task should determine the tier, not the availability of a favorite board, framework, or platform.
Embedded Energy Model and Duty-Cycle Logic
The foundational embedded energy relationship is simple, but its implications are powerful:
E = P \times t
\]
Interpretation: Total energy depends on power and time. In embedded infrastructure, reducing active duration can matter as much as reducing instantaneous power.
In embedded systems, long deployment horizons make average power more important than peak values alone. A node that wakes for a few milliseconds every five minutes can consume very little total energy if sleep current remains low and active work is tightly bounded. Conversely, a device with good active efficiency can still waste energy if it wakes too often, spends too long transmitting, or fails to enter low-power modes correctly.
For switching-dominated digital logic, a common approximation is:
P_d \approx C \times V^2 \times f
\]
Interpretation: Dynamic power rises with switching capacitance, the square of voltage, and clock frequency, which makes voltage scaling, clock discipline, and shorter active windows central to embedded efficiency.
This helps explain why algorithmic efficiency is a power-management technique. Fewer instructions, fewer memory accesses, shorter sensor windows, fewer radio sessions, and smaller inference graphs can reduce active-time energy even if hardware is unchanged. Firmware is therefore part of the power system.
Duty-cycle discipline is the practical heart of embedded efficiency. Stay asleep as long as possible. Wake only when useful work exists. Keep active phases short. Batch work where appropriate. Use interrupts instead of polling. Prefer DMA and low-power peripherals where they reduce CPU activity. Transmit only when the value of communication exceeds its energy cost. Design the system so that higher-power tiers are awakened only when local logic justifies escalation.
The most sustainable embedded systems are not necessarily those with the lowest active current on a data sheet. They are systems whose entire workload, communication pattern, sleep behavior, and maintenance model have been designed around minimizing lifetime burden.
MCU Tier: Low-Power Cortex-M and Event-Driven Design
The MCU tier is the foundation of long-life embedded infrastructure. Cortex-M-class microcontrollers and similar low-power devices are well suited for sensing, metering, control, wake-word style detection, anomaly triggers, and simple edge classification because they can spend most of their time in low-power states. In this tier, the central design pattern is event-driven execution: the CPU should do almost nothing until an interrupt, timer, sensor threshold, or external event requires action.
This matters because the MCU tier often determines fleet-level viability. If endpoint devices wake too often, remain active too long, or transmit unnecessarily, the fleet inherits shorter battery life, more replacement visits, more failures, and higher operational cost. If endpoints are disciplined, gateways and upstream systems receive less noise, fewer unnecessary packets, and more meaningful events.
Low-power MCU design requires attention to more than core selection. Clock-tree configuration, peripheral gating, sleep-state selection, wake-source control, brownout settings, ADC timing, DMA use, memory layout, sensor power switching, and radio batching all affect lifetime energy. A firmware design that leaves a peripheral clock enabled or polls a sensor continuously can erase the advantage of low-power hardware.
Event-driven design is also more robust in field systems because it reduces unnecessary activity and makes the device’s behavior easier to reason about. The system sleeps. A meaningful event occurs. The device wakes. It samples, processes, stores, transmits, or escalates as needed. Then it returns to sleep. This pattern aligns well with environmental monitoring, water systems, agricultural sensing, asset tracking, metering, public-infrastructure telemetry, and many industrial monitoring workloads.
The MCU tier should therefore be treated as the first design option for persistent sensing and control. Higher compute tiers should be used only when the task clearly exceeds what an endpoint can do safely, reliably, and maintainably.
TinyML on the Endpoint
TinyML belongs naturally in sustainable embedded infrastructure because it allows MCU-class endpoints to make simple local decisions without waking higher-power systems or transmitting all raw data upstream. A vibration anomaly detector, acoustic trigger, environmental classifier, wake-word model, occupancy estimator, or threshold-based quality filter can remain local most of the time and escalate only when confidence crosses a defined threshold.
The sustainability value of TinyML is architectural. Local inference can reduce radio usage, gateway workload, cloud ingestion, storage, false alarms, and service-call burden. The model is not valuable because inference is fashionable. It is valuable when inference prevents more expensive communication, computation, or maintenance elsewhere in the infrastructure system.
On MCU-class platforms, practical TinyML usually means static memory allocation, quantized models, constrained operator sets, fixed tensor arenas, careful feature extraction, and optimized kernels where supported. These constraints are not inconveniences; they are part of what makes the endpoint viable. A model that requires too much memory, too much active time, or too much energy may be less sustainable than a simpler rule-based trigger.
TinyML also changes the data architecture. Instead of sending every sensor window upstream, the endpoint can discard uninteresting data, summarize patterns, compress features, or transmit only anomalies. This reduces bandwidth and energy use, but it also requires governance discipline. Local filtering should be transparent enough to evaluate false negatives, missed events, sensor drift, and model degradation over time.
Endpoint inference is therefore best understood as an escalation filter. It helps decide when higher tiers should be awakened. Used carefully, it makes distributed digital infrastructure more efficient. Used carelessly, it can create opaque failure modes. Sustainable TinyML requires both energy discipline and monitoring discipline.
Linux Edge Tier: CPUFreq, Scheduling, and Power-State Control
Linux-class edge devices are necessary when workloads demand richer networking, secure connectivity, local storage, protocol orchestration, update management, containerized services, or more complex preprocessing. They provide flexibility that MCUs cannot match. But that flexibility comes at a higher energy baseline, which makes power management architectural rather than incidental.
Linux edge systems can become inefficient when they are used as convenient substitutes for disciplined endpoint design. A small sensing task that could run on an MCU may be wasteful on a single-board computer if the Linux node stays awake continuously. A gateway that polls too frequently, logs excessively, wakes radios unnecessarily, or runs background services without power awareness can consume far more energy than the application logic itself requires.
Power management on Linux therefore includes CPU frequency scaling, idle-state residency, task placement, peripheral control, network batching, storage write reduction, suspend and resume behavior, and service scheduling. CPUFreq can reduce power by adjusting operating frequency, while energy-aware scheduling can help place tasks more efficiently on supported systems. These mechanisms are useful, but they cannot compensate for a poorly mapped architecture.
The most important Linux-edge question is whether the platform needs to be awake at all. If work can be handled by MCU endpoints and escalated in batches, the gateway can sleep, reduce network activity, or run at lower duty cycle. If the gateway must stay active for security, protocol, or coordination reasons, then the workload should be shaped to reduce wakeups, avoid unnecessary polling, and keep high-power states short.
Sustainable Linux edge design is therefore a whole-platform practice. It includes kernel power features, service design, hardware selection, peripheral management, network scheduling, update strategy, and workload partitioning. Linux should exist in the edge stack because its capabilities are necessary, not because it is easier than designing endpoint systems properly.
PYNQ and Adaptive Acceleration for Edge Efficiency
PYNQ fits this architecture when framed as a productivity layer for adaptive acceleration rather than as a novelty board workflow. PYNQ makes FPGA-backed systems more accessible by allowing Python-side interaction with overlays, DMA buffers, programmable logic blocks, and host-controlled acceleration pipelines. This is valuable when a workload benefits from hardware acceleration without requiring every developer to work entirely through low-level RTL-first flows.
The sustainability argument for PYNQ and adaptive acceleration is narrower than the argument for low-power MCU design, but it is still important. If a repeated signal-processing, filtering, compression, packet-processing, feature-extraction, or preprocessing workload can be offloaded into programmable logic and completed faster or with lower joule cost than on a general-purpose CPU, then acceleration can improve performance per watt. It can also reduce CPU active time, thermal load, latency, and gateway energy burden.
This does not mean that FPGA acceleration is automatically greener. Programmable logic has its own power cost, development complexity, memory-transfer overhead, and maintenance burden. The accelerator must be justified by the workload. A small, infrequent computation may not justify the additional system complexity. A repeated high-throughput or latency-sensitive computation may justify it strongly.
The right question is whether acceleration reduces total system burden. That includes CPU active time, data movement, memory copies, latency, thermal stress, board power, development complexity, and long-term maintainability. A PYNQ workflow is most defensible when it allows engineers to prototype and evaluate these trade-offs quickly while preserving the option to move performance-critical paths into programmable logic.
Adaptive acceleration therefore belongs at the third tier of sustainable digital infrastructure: powerful when needed, wasteful when overused, and most valuable when its performance-per-joule advantage is measured rather than assumed.
Choosing the Right Compute Tier
The most important engineering question is not “Which platform is best?” but “Which compute tier is light enough for the task?” Sustainable digital infrastructure does not emerge from one magic low-power trick. It emerges from mapping each workload to the lowest viable compute rung and refusing to overprovision by habit.
Stay on MCU or TinyML endpoints when the workload involves always-on sensing, simple anomaly detection, threshold classification, wake-word style detection, low-bandwidth control, local feature extraction, or event escalation. This is usually the lowest-energy path because the endpoint can sleep most of the time and transmit only meaningful events.
Move to Linux edge when the workload requires richer networking, secure device orchestration, local storage, complex protocol handling, update coordination, gateway routing, containerized services, or integration with external systems that are difficult to support on an MCU. Linux should be justified by capability requirements, not by convenience alone.
Move to PYNQ or adaptive acceleration when repeated DSP, filtering, compression, preprocessing, packet processing, or selected inference workloads justify hardware offload and improve performance per joule relative to CPU execution. Acceleration is strongest when the workload is frequent, structured, and expensive enough that hardware specialization reduces total active burden.
This tiering framework also protects maintainability. Overly complex endpoints become hard to service. Overly weak endpoints shift too much burden upstream. Overly powerful gateways waste energy. Overly specialized accelerators can create development lock-in. The right tier is the one that satisfies accuracy, latency, reliability, security, serviceability, and lifecycle constraints with the least practical energy and material burden.
Sustainable embedded architecture is therefore a discipline of sufficiency. Use enough compute to do the job well, but not so much that the infrastructure becomes heavier than the task requires.
Communications, Radio Energy, and Data Minimization
In many embedded systems, communication dominates the energy budget. A device may spend little energy sampling a sensor but far more energy powering a radio, joining a network, transmitting packets, retrying after failure, or maintaining connectivity. This makes data minimization one of the most important sustainability techniques in distributed digital infrastructure.
Data minimization begins with a simple question: what information actually needs to leave the endpoint? Raw data is sometimes necessary, especially for calibration, auditing, research, or model improvement. But many infrastructure systems do not need continuous raw streams. They need events, summaries, alarms, trends, confidence scores, or compressed windows. Sending less data can reduce radio-on time, gateway processing, backhaul use, storage burden, and downstream compute.
Batching also matters. A device that transmits every small observation separately may waste energy on repeated connection overhead. A device that stores local samples and transmits compressed summaries at planned intervals may reduce total energy, provided latency requirements allow it. In some systems, event-triggered communication is best. In others, scheduled bursts are more efficient. The communication pattern should follow the infrastructure need.
Radio choice also matters. Bluetooth Low Energy, LoRaWAN, cellular IoT, Wi-Fi, Zigbee, Thread, sub-GHz links, and wired industrial protocols all imply different trade-offs among range, bandwidth, latency, power, reliability, infrastructure dependence, and maintainability. The lowest-power radio is not always the most sustainable if it produces unreliable service or expensive maintenance. The best communication layer is the one that meets the system’s reliability and service requirements with the lowest lifetime burden.
Energy-efficient embedded infrastructure therefore depends on computation and communication being designed together. Sometimes local inference saves energy because it prevents radio use. Sometimes transmitting a small packet is cheaper than computing a complex model locally. Sustainable architecture requires measuring the whole chain rather than assuming that local processing or transmission is always better.
Security, Updates, and Reliability
Energy efficiency cannot be separated from security and reliability. A device that saves power but cannot be updated safely may become a long-lived vulnerability. A device that is secure but requires frequent, energy-heavy update cycles may impose hidden operational cost. A device that sleeps deeply but misses critical events may fail its infrastructure purpose. Sustainable embedded systems must therefore balance energy discipline with trustworthy operation.
Security adds energy and complexity because devices may need cryptographic operations, secure boot, encrypted communication, authenticated updates, key storage, logging, and tamper-resistance. These features should not be treated as optional decorations. Distributed infrastructure devices can become attack surfaces, especially when they control or monitor utilities, environmental systems, buildings, industrial processes, or public infrastructure. A low-power device that is insecure can create far greater systemic cost than it saves.
Updates also shape lifecycle sustainability. Secure over-the-air updates can reduce field visits, extend device life, patch vulnerabilities, and improve models or algorithms after deployment. But update systems must be designed carefully. Large updates, frequent update failures, poor rollback mechanisms, or excessive write cycles can increase energy use and reliability risk. Efficient update design includes delta updates, scheduled update windows, integrity checks, fallback partitions where feasible, and clear recovery paths.
Reliability is the third constraint. Energy-saving modes should not undermine service requirements. A water-quality monitor that misses contamination events, a structural sensor that sleeps through vibration anomalies, or an industrial controller that fails to wake under fault conditions is not sustainable. Power management must be tested against real duty cycles, environmental conditions, sensor behavior, and failure modes.
The strongest embedded systems are therefore not merely low-power. They are low-power, secure, updateable, observable, and reliable. Sustainable infrastructure requires devices that can remain trusted over long deployments, not just devices that perform well during a lab demonstration.
Lifecycle Efficiency, Servicing, and Sustainability
The strongest sustainability case for embedded efficiency appears when lifecycle effects are made explicit. A device that runs five years instead of one year on its power source reduces replacement frequency. A node that performs local inference and transmits only exceptions reduces communication burden. A gateway that uses acceleration to shorten CPU-active windows may reduce heat, improve component longevity, and lower sustained energy demand. These are not abstract side benefits. In large fleets, they are often where the real savings emerge.
Maintenance is one of the most overlooked energy and material costs in embedded infrastructure. A service visit may involve vehicle travel, technician time, replacement parts, batteries, access permissions, safety procedures, downtime, and documentation. In remote environmental monitoring, agricultural telemetry, water systems, or industrial sites, the maintenance burden can exceed the energy consumed by the electronics themselves. Extending service intervals is therefore a sustainability strategy.
Battery replacement is especially important. Battery chemistry, capacity, temperature exposure, discharge pattern, self-discharge, and replacement logistics all shape lifecycle burden. A device that reduces average current but operates in a way that stresses the battery may not achieve the expected lifetime. Similarly, a solar-powered node with poor sleep behavior may still fail during low-light periods because its energy buffer was sized around optimistic assumptions.
Lifecycle efficiency also includes failure reduction. Devices that run cooler, sleep more predictably, communicate less wastefully, and avoid unnecessary writes may last longer. Fewer failures mean fewer replacements, fewer site visits, fewer emergency interventions, and more reliable data. In infrastructure systems, reliability is itself a sustainability outcome because failed devices produce wasted material and degraded public function.
Sustainable digital infrastructure should therefore be measured not only in watts, but in service intervals, battery turnover, failure rates, replacement cycles, field visits, data quality, and operational continuity. Embedded efficiency is infrastructure engineering because it changes those lifetime system behaviors.
Why Low Power Alone Is Not Enough
It is not enough for an embedded device to be low power in isolation. A low-power device can still be unsustainable if it is unreliable, insecure, difficult to update, impossible to repair, dependent on proprietary lock-in, poorly documented, or mismatched to the infrastructure task. Sustainable embedded systems require a broader standard than current draw.
This matters because energy optimization can become narrow. Engineers may reduce active current while ignoring radio retries. They may optimize inference while neglecting field calibration. They may choose a tiny endpoint while shifting too much burden to gateways. They may accelerate a workload while increasing development complexity and maintenance dependence. Each choice can look efficient locally while increasing system burden elsewhere.
Low power also cannot compensate for poor workload placement. A Linux gateway optimized with CPUFreq may still be wasteful if it is performing a task that should have remained on an MCU. A TinyML endpoint may still be wasteful if the model is too heavy, inaccurate, or unnecessary. An FPGA accelerator may still be wasteful if the data-transfer overhead exceeds the compute savings. Efficiency must be evaluated across the full architecture.
Nor can energy efficiency substitute for ethical and ecological design. Distributed sensors, smart infrastructure, and intelligent monitoring systems can support sustainability, but they can also increase surveillance, electronic waste, dependency, and extractive data practices if governance is weak. A device that uses less energy but contributes to an unnecessary or harmful system is not sustainable in a meaningful sense.
The deeper goal is therefore not low power as an isolated engineering metric, but embedded infrastructure that is energy-aware, secure, maintainable, repairable, proportionate, and publicly useful. Sustainable digital infrastructure depends on systems that do necessary work with minimal lifetime burden and clear accountability for the consequences of deployment.
Why This Matters for Sustainable Development
Energy-efficient embedded systems matter for sustainable development because they shape the material and operational cost of digital infrastructure at the point where computing meets the physical world. Environmental monitors, smart meters, water-system sensors, agricultural telemetry, industrial controllers, transport devices, and edge gateways are not abstract digital services. They are physical systems deployed in places, powered by limited energy, maintained by people, and embedded in infrastructures that either remain reliable or degrade over time.
This is why embedded efficiency matters so much. It reveals a central truth that broader digital transformation rhetoric can miss: digital systems have bodies. They use energy, occupy materials, require maintenance, generate waste, and depend on supply chains. Sustainable digital infrastructure cannot be judged only by connectivity, analytics, or platform capability. It must also be judged by the physical burden of the devices that make digital sensing and control possible.
The issue is also one of public capacity. Low-maintenance, long-life, secure, and efficient devices make monitoring and service systems more viable in remote, underserved, or resource-constrained settings. Wasteful devices can turn digital infrastructure into a fragile pilot project that collapses under maintenance burden. Efficient embedded design can help extend environmental monitoring, water-system visibility, agricultural resilience, industrial safety, and public infrastructure management to places where frequent servicing is impractical.
To take energy-efficient embedded systems seriously is therefore to take sustainable digital infrastructure seriously. Long-run development depends not only on what digital systems promise, but on whether the physical edge layer can operate reliably, affordably, securely, and with low material burden across years of real deployment.
Development becomes credible when embedded devices are designed for sufficiency rather than excess, when local intelligence reduces unnecessary communication, when power states are governed with discipline, when service intervals are extended, and when the digital infrastructure that monitors the world is itself built with ecological and operational restraint.
Mathematical Lens
Energy-efficient embedded infrastructure can be modeled as a lifecycle burden minimization problem. Let \(B\) denote total burden, \(P_a\) active power, \(t_a\) active time, \(P_s\) sleep power, \(t_s\) sleep time, and \(M\) maintenance burden:
B = (P_a \times t_a) + (P_s \times t_s) + M
\]
Interpretation: Total embedded burden includes active energy, sleep-state energy, and maintenance burden. Reducing wake duration and service visits can matter as much as lowering active current.
This equation makes the infrastructure framing visible. A device is not only an electrical load; it is a maintained object in a deployment system. Maintenance burden may include site visits, battery replacement, device failure, recalibration, and logistics.
For endpoint inference, an escalation rule can be represented as:
T =
\begin{cases}
0 & \text{if } \hat{y} < \tau \\
1 & \text{if } \hat{y} \geq \tau
\end{cases}
\]
Interpretation: TinyML can reduce higher-tier workload when local confidence crosses an escalation threshold only for meaningful events.
Here, \(\hat{y}\) is local model confidence and \(\tau\) is an alert threshold. This captures the logic of transmitting, waking a gateway, or escalating to higher compute only when necessary.
Fleet-scale burden can be approximated as:
F = N \times (B + L)
\]
Interpretation: Fleet burden scales with the number of deployed devices, per-device burden, and logistics overhead; small per-device savings become significant at infrastructure scale.
Here, \(N\) is fleet size and \(L\) is logistics overhead per device. This is why milliwatt-scale savings, radio minimization, and longer battery life become important when systems scale.
A compute-tier selection problem can also be expressed as constrained minimization:
\min_{k \in \{m,l,a\}} E_k
\quad \text{subject to} \quad
Q_k \geq Q_{\min},\; R_k \geq R_{\min},\; S_k \geq S_{\min}
\]
Interpretation: Choose the lowest-energy compute tier only if it meets minimum requirements for quality, reliability, and security.
Here, \(m\) represents MCU endpoints, \(l\) Linux edge nodes, and \(a\) adaptive acceleration. \(Q\) is task quality, \(R\) reliability, and \(S\) security or safety adequacy. This prevents “low power” from overriding the system’s actual purpose.
| Term | Meaning | Interpretive role |
|---|---|---|
| \(B\) | Total device burden | Represents active energy, sleep energy, and maintenance overhead for one device. |
| \(P_a\) | Active power | Represents power draw while computing, sensing, transmitting, or processing. |
| \(t_a\) | Active time | Represents how long the device remains in high-power states. |
| \(P_s\) | Sleep power | Represents current draw while the device is idle or in low-power states. |
| \(M\) | Maintenance burden | Represents battery replacement, site visits, servicing, failures, and recalibration overhead. |
| \(T\) | Escalation decision | Represents whether local inference triggers transmission or higher-tier compute. |
| \(F\) | Fleet-scale burden | Represents infrastructure-level burden across many deployed devices. |
The equations are conceptual rather than predictive. Their value is to make visible the structure of the problem: embedded systems contribute to sustainable digital infrastructure only when power, time, communication, maintenance, reliability, security, and fleet scale are evaluated together.
Embedded C Pattern: Event-Driven Low-Power Execution
This embedded C pattern illustrates the MCU-tier design logic. The device sleeps by default, wakes only when an event occurs, performs minimal useful work, and immediately returns to a low-power state. The code is intentionally simple because the architectural pattern matters more than the specific peripheral implementation.
// Cortex-M event-driven low-power pattern.
// The goal is to keep the CPU asleep except during useful work.
#include "stm32f0xx.h"
#include <stdint.h>
volatile uint8_t event_flag = 0;
void SysTick_Handler(void)
{
event_flag = 1;
}
static void enter_low_power_mode(void)
{
// Complete outstanding memory operations before sleeping.
__DSB();
// Wait for interrupt. The CPU sleeps until an interrupt wakes it.
__WFI();
}
static void sample_and_process(void)
{
// Keep this phase short:
// 1. power the sensor if needed,
// 2. sample,
// 3. run lightweight processing or TinyML trigger logic,
// 4. queue or transmit only if useful,
// 5. power down peripherals.
}
int main(void)
{
SystemInit();
while (1)
{
if (event_flag)
{
event_flag = 0;
sample_and_process();
}
enter_low_power_mode();
}
}
This pattern remains one of the most important embedded-energy building blocks because it maximizes time in low-power states while preserving responsiveness. In real systems, the same logic would be extended with peripheral gating, watchdog configuration, sensor power control, radio batching, and careful wake-source management.
TinyML C++ Pattern: Endpoint Inference Gating
This TinyML pattern illustrates how endpoint inference can act as an escalation filter. The model runs locally on a small sensor window, and only high-confidence events trigger communication, a radio wakeup, or gateway notification. The sustainability value comes from avoiding unnecessary higher-tier computation and communication.
// TinyML endpoint inference skeleton using LiteRT / TFLite Micro style APIs.
// The purpose is local event gating, not continuous raw-data streaming.
#include <cstdint>
#include "tensorflow/lite/micro/micro_interpreter.h"
#include "tensorflow/lite/micro/micro_mutable_op_resolver.h"
#include "tensorflow/lite/schema/schema_generated.h"
#include "tensorflow/lite/version.h"
// Replace with your converted .tflite model as a C array.
extern const unsigned char g_model[];
extern const int g_model_len;
// Static tensor arena: avoids heap allocation.
constexpr int kTensorArenaSize = 8 * 1024;
alignas(16) uint8_t tensor_arena[kTensorArenaSize];
int main()
{
const tflite::Model* model = tflite::GetModel(g_model);
if (model->version() != TFLITE_SCHEMA_VERSION)
{
return 1;
}
tflite::MicroMutableOpResolver<4> resolver;
resolver.AddFullyConnected();
resolver.AddReshape();
resolver.AddSoftmax();
resolver.AddQuantize();
tflite::MicroInterpreter interpreter(
model,
resolver,
tensor_arena,
kTensorArenaSize
);
if (interpreter.AllocateTensors() != kTfLiteOk)
{
return 2;
}
TfLiteTensor* input = interpreter.input(0);
// Example quantized features from a sensor window.
input->data.int8[0] = 12;
input->data.int8[1] = -4;
input->data.int8[2] = 7;
input->data.int8[3] = 3;
if (interpreter.Invoke() != kTfLiteOk)
{
return 3;
}
TfLiteTensor* output = interpreter.output(0);
int8_t anomaly_score = output->data.int8[0];
if (anomaly_score > 64)
{
// Escalate only when needed:
// wake radio, transmit packet, or notify gateway.
}
return 0;
}
In production systems, this pattern should be paired with model monitoring, calibration data, false-positive analysis, false-negative review, and fallback behavior for sensor drift. Endpoint inference saves energy only when it remains accurate enough to reduce unnecessary communication without hiding important events.
Linux Bash Workflow: CPUFreq and Energy-State Inspection
This Linux workflow provides a lightweight way to inspect power-management behavior on supported edge devices. It is useful for evaluating whether a gateway or Linux edge node is using frequency scaling and whether energy-state information is available.
#!/usr/bin/env bash
set -euo pipefail
CPU_PATH="/sys/devices/system/cpu/cpu0/cpufreq"
echo "Available CPUFreq governors:"
if [[ -f "${CPU_PATH}/scaling_available_governors" ]]; then
cat "${CPU_PATH}/scaling_available_governors"
else
echo "CPUFreq governor list not available on this system."
fi
echo
echo "Current CPUFreq governor:"
if [[ -f "${CPU_PATH}/scaling_governor" ]]; then
cat "${CPU_PATH}/scaling_governor"
else
echo "Current governor not available on this system."
fi
echo
echo "Frequency-state residency:"
if [[ -f "${CPU_PATH}/stats/time_in_state" ]]; then
cat "${CPU_PATH}/stats/time_in_state"
else
echo "time_in_state not available on this system."
fi
echo
echo "Energy model information, if exposed by the kernel:"
find /sys/devices/system/cpu/energy_model -type f -maxdepth 3 2>/dev/null \
-exec sh -c 'echo "--- $1"; cat "$1"' _ {} \; || true
This workflow does not optimize the system by itself. It helps make power behavior visible. Sustainable Linux-edge design still requires workload scheduling, service reduction, device-state management, network batching, and careful evaluation of whether Linux is the correct tier for the task.
Advanced Python Workflow: Duty-Cycle and Inference Energy Budget Modeling
This Python workflow compares endpoint designs with and without local inference gating. It estimates average current, approximate battery life, and event-escalation burden. It is useful for early design decisions, especially when comparing a simple endpoint, a TinyML-enabled endpoint, and a more communication-heavy design.
from __future__ import annotations
import pandas as pd
INPUT_FILE = "tinyml_endpoint_energy_panel.csv"
OUTPUT_FILE = "tinyml_endpoint_energy_results.csv"
# Expected columns:
# device_name, active_current_ma, sleep_current_ua,
# active_time_ms, wakeups_per_hour, battery_capacity_mah,
# inference_trigger_rate, radio_tx_cost_factor
def load_data(path: str) -> pd.DataFrame:
"""Load endpoint energy scenarios from a CSV file."""
df = pd.read_csv(path)
required = [
"device_name",
"active_current_ma",
"sleep_current_ua",
"active_time_ms",
"wakeups_per_hour",
"battery_capacity_mah",
"inference_trigger_rate",
"radio_tx_cost_factor",
]
missing = [col for col in required if col not in df.columns]
if missing:
raise ValueError(f"Missing required columns: {missing}")
return df
def validate_inputs(df: pd.DataFrame) -> pd.DataFrame:
"""Validate that energy-model inputs are physically meaningful."""
numeric_columns = [
"active_current_ma",
"sleep_current_ua",
"active_time_ms",
"wakeups_per_hour",
"battery_capacity_mah",
"inference_trigger_rate",
"radio_tx_cost_factor",
]
for col in numeric_columns:
if df[col].isna().any():
raise ValueError(f"Column '{col}' contains missing values.")
if (df[col] < 0).any():
raise ValueError(f"Column '{col}' contains negative values.")
if (df["inference_trigger_rate"] > 1).any():
raise ValueError("inference_trigger_rate must be between 0 and 1.")
return df
def compute_metrics(df: pd.DataFrame) -> pd.DataFrame:
"""Compute duty-cycle, average current, battery life, and escalation burden."""
df = df.copy()
df["sleep_current_ma"] = df["sleep_current_ua"] / 1000.0
df["active_hours_per_hour"] = (
(df["active_time_ms"] / 1000.0 / 3600.0) *
df["wakeups_per_hour"]
).clip(lower=0, upper=1)
df["sleep_hours_per_hour"] = 1.0 - df["active_hours_per_hour"]
df["average_current_ma"] = (
df["active_current_ma"] * df["active_hours_per_hour"] +
df["sleep_current_ma"] * df["sleep_hours_per_hour"]
)
df["battery_life_hours"] = (
df["battery_capacity_mah"] / df["average_current_ma"]
)
df["battery_life_days"] = df["battery_life_hours"] / 24.0
# Proxy for upstream or radio burden after local inference gating.
df["escalation_burden_score"] = (
df["wakeups_per_hour"] *
df["inference_trigger_rate"] *
df["radio_tx_cost_factor"]
)
return df
def main() -> None:
df = load_data(INPUT_FILE)
df = validate_inputs(df)
results = compute_metrics(df)
results.to_csv(OUTPUT_FILE, index=False)
print("TinyML endpoint energy modeling complete.")
print(results.to_string(index=False))
if __name__ == "__main__":
main()
This workflow is intentionally transparent. It does not claim to replace board-level measurement. Its purpose is to make early design assumptions visible: active current, sleep current, wake frequency, active duration, battery capacity, inference-trigger rate, and radio burden. Real hardware should still be measured with a power profiler or precision current monitor because firmware, peripherals, temperature, and radio conditions can shift the actual budget significantly.
Advanced R Workflow: Fleet-Level Lifecycle Burden and Service Overhead
This R workflow compares fleet scenarios across device count, average device power, battery life, service-trip burden, failure rates, and replacement intensity. It is designed to shift analysis from a single-device perspective to a fleet-level infrastructure perspective.
library(readr)
library(dplyr)
input_file <- "embedded_fleet_lifecycle_panel.csv"
output_file <- "embedded_fleet_lifecycle_summary.csv"
# Expected columns:
# scenario_name, fleet_size, average_device_power_mw,
# battery_life_days, service_trip_emissions_kg,
# annual_failure_rate, replacement_material_factor
fleet_df <- read_csv(input_file, show_col_types = FALSE)
required_cols <- c(
"scenario_name",
"fleet_size",
"average_device_power_mw",
"battery_life_days",
"service_trip_emissions_kg",
"annual_failure_rate",
"replacement_material_factor"
)
missing_cols <- setdiff(required_cols, names(fleet_df))
if (length(missing_cols) > 0) {
stop(paste("Missing required columns:", paste(missing_cols, collapse = ", ")))
}
invalid_numeric_cols <- required_cols[
required_cols != "scenario_name" &
vapply(
fleet_df[required_cols[required_cols != "scenario_name"]],
function(x) any(is.na(x) | x < 0),
logical(1)
)
]
if (length(invalid_numeric_cols) > 0) {
stop(
paste(
"Numeric columns must be complete and non-negative:",
paste(invalid_numeric_cols, collapse = ", ")
)
)
}
summary_df <- fleet_df %>%
mutate(
annual_replacements_per_device = 365 / battery_life_days,
annual_service_emissions_kg = (
fleet_size *
annual_replacements_per_device *
service_trip_emissions_kg
),
annual_failure_burden = (
fleet_size *
annual_failure_rate *
replacement_material_factor
),
fleet_energy_burden_index = fleet_size * average_device_power_mw,
lifecycle_burden_proxy = (
annual_service_emissions_kg +
annual_failure_burden +
fleet_energy_burden_index
)
) %>%
arrange(desc(lifecycle_burden_proxy))
write_csv(summary_df, output_file)
cat("Fleet lifecycle summary exported to:", output_file, "\n")
print(summary_df)
This workflow helps distinguish device-level efficiency from infrastructure-level sustainability. A design that looks only slightly better per device may dramatically reduce service trips, replacements, and failure burden at fleet scale. Conversely, a design that looks efficient in the lab may become burdensome if it fails early or requires frequent human servicing.
GitHub Repository
Complete Code Repository
The full code distribution for this article, including TinyML endpoint examples, PYNQ edge-acceleration scaffolding, duty-cycle modeling, lifecycle analysis workflows, supporting documentation, and repository structure, is available on GitHub.
Related Articles
- Digital Infrastructure and Development Capacity
- Infrastructure as the Material Basis of Development
- Innovation, Technology Transfer, and Leapfrogging
- Business as Usual vs Sustainable Development
- Climate Change as a Development Constraint
- Water, Sanitation, and Public Infrastructure Systems
- Local Governance, Cities, and Territorial Development
- Environmental Monitoring Systems
- Embedded and Edge Systems
- Artificial Intelligence Systems
Further Reading
- Google AI Edge (n.d.) LiteRT for Microcontrollers overview. Available at: https://ai.google.dev/edge/litert/microcontrollers/overview
- Linux Kernel Documentation (n.d.) CPU performance scaling in Linux. Available at: https://docs.kernel.org/admin-guide/pm/cpufreq.html
- Linux Kernel Documentation (n.d.) Energy Aware Scheduling. Available at: https://docs.kernel.org/scheduler/sched-energy.html
- PYNQ Documentation (v3.1) (n.d.) PYNQ.remote. Available at: https://pynq.readthedocs.io/en/v3.1/pynq_remote.html
- Arm (n.d.) Cortex-M0+ product page. Available at: https://www.arm.com/products/silicon-ip-cpu/cortex-m/cortex-m0-plus
- NXP (n.d.) Ultra-Low-Power. Available at: https://www.nxp.com/applications/technologies/low-power:LOW-POWER
References
- Google AI Edge (n.d.) LiteRT for Microcontrollers overview. Available at: https://ai.google.dev/edge/litert/microcontrollers/overview
- Linux Kernel Documentation (n.d.) CPU performance scaling in Linux. Available at: https://docs.kernel.org/admin-guide/pm/cpufreq.html
- Linux Kernel Documentation (n.d.) CPU frequency and voltage scaling. Available at: https://docs.kernel.org/cpu-freq/index.html
- Linux Kernel Documentation (n.d.) Energy Aware Scheduling. Available at: https://docs.kernel.org/scheduler/sched-energy.html
- PYNQ Documentation (v3.1) (n.d.) PYNQ.remote. Available at: https://pynq.readthedocs.io/en/v3.1/pynq_remote.html
- PYNQ Documentation (v3.1) (n.d.) PynqBuffer contiguous-memory allocation. Available at: https://pynq.readthedocs.io/en/v3.1/_modules/pynq/buffer.html
- PYNQ Documentation (n.d.) PYNQ: Python productivity for Adaptive Computing platforms. Available at: https://pynq.readthedocs.io/en/v3.1/
- Arm (n.d.) Cortex-M0+ product page. Available at: https://www.arm.com/products/silicon-ip-cpu/cortex-m/cortex-m0-plus
- STMicroelectronics (2026) AN6195: How to optimize power consumption on STM32U3 MCUs. Available at: https://www.st.com/resource/en/application_note/an6195-how-to-optimize-power-consumption-on-stm32u3-mcus-stmicroelectronics.pdf
- NXP (n.d.) Ultra-Low-Power. Available at: https://www.nxp.com/applications/technologies/low-power:LOW-POWER
- AMD (n.d.) Zynq-7000 SoC Technical Reference Manual. Available at: https://docs.amd.com/r/en-US/ug585-zynq-7000-SoC-TRM