
Last Updated May 28, 2026
Modern waste systems depend on accurate sorting. Recycling programs only succeed when materials such as plastics, metals, paper, glass, and composites are properly separated before processing. When sorting fails, contamination increases, recovery rates decline, and valuable materials are lost to landfill or downcycled into lower-value uses.
An Arduino recycling sorter demonstrates how embedded systems can support smarter waste management. By combining sensors, microcontroller logic, and automated actuators, a small sorter can detect incoming objects, apply simple classification logic, and route materials into different containers.
This project demonstrates how to build a small automated recycling sorter capable of distinguishing a baseline material category and directing items through a servo-controlled gate. While simple, the system reflects a broader sustainability principle: automation and measurement improve resource efficiency only when they are paired with accurate classification, responsible design, and realistic limits. Technologies like this support SDG 12: Responsible Consumption and Production by helping students and builders understand contamination, material recovery, and circular-system design.
Main Library
Publications
Project Series
Arduino SDG Projects
Related Topic
Infrastructure Systems
Related Topic
Novel Entities
Related Topic
Planetary Boundaries

The project also connects to broader site areas, including Intelligent Infrastructure Systems, Sustainable Development Goals Within Planetary Boundaries, Novel Entities and the Problem of Synthetic Overload, and Planetary Boundaries. In that wider context, this sorter is not only a maker project. It is a small prototype of the sensing, classification, routing, and material-flow infrastructure needed for more circular waste systems.
Abstract
This project presents a prototype Arduino recycling sorter built around a microcontroller, object-detection sensor, material-sensing logic, and a servo-actuated diversion gate. The system detects incoming items, applies simple classification logic, and routes objects into separate bins based on sensor input.
From an engineering perspective, the build demonstrates a compact automation system with sensing, control, and actuation layers. From a sustainability perspective, it illustrates how low-cost embedded systems can help students and builders understand contamination, material recovery, sorting accuracy, and circular waste infrastructure.
The prototype is intentionally limited. It does not perform industrial material recognition, optical polymer sorting, contamination analysis, or safety-certified waste processing. Its value is educational and methodological: it makes the logic of sensing, classification, routing, error, and validation visible in a small reproducible system.
SDG Alignment: Responsible Consumption, Infrastructure, Cities, and Circular Materials
This project connects most directly to SDG 12: Responsible Consumption and Production, which emphasizes reducing waste, improving resource efficiency, and supporting more circular material systems. Recycling is only effective when materials can be identified, separated, processed, and returned to productive use with manageable contamination.
The project is not an industrial recycling facility, automated materials-recovery system, or complete circular-economy solution. Its contribution is narrower and still valuable: it demonstrates the classification-and-routing logic behind automated waste sorting. It shows how a small embedded system can detect an item, read a material-related signal, choose a routing category, actuate a gate, and evaluate whether the object reached the intended destination.
| Sustainable Development Goal | How the Project Relates | Project-Level Mechanism |
|---|---|---|
| SDG 12: Responsible Consumption and Production | Supports waste reduction, contamination awareness, material recovery, and circular-systems education. | Object detection, material classification, servo routing, sorting-event logging, and contamination-rate analysis. |
| SDG 9: Industry, Innovation and Infrastructure | Demonstrates low-cost automation and prototype infrastructure for material-flow systems. | Microcontroller control, sensor input, actuator routing, reproducible firmware, and mechatronic sorting logic. |
| SDG 11: Sustainable Cities and Communities | Relates to urban waste handling, cleaner local systems, school recycling, public-space waste sorting, and community infrastructure. | Small-scale sorting demonstration that connects local waste behavior with larger municipal waste challenges. |
| SDG 14: Life Below Water | Connects indirectly to reducing plastic and material leakage into waterways and marine environments. | Improved material separation and waste-flow awareness before materials escape into storm drains, rivers, or coastal systems. |
| SDG 4: Quality Education | Provides hands-on learning in electronics, automation, waste systems, circular economy, and responsible engineering. | Open prototype with firmware, wiring logic, calibration notes, validation metrics, and reusable classroom activities. |
The strongest SDG connection is SDG 12. Sorting is one of the hidden technical bottlenecks in responsible material use. If a recyclable stream is contaminated, the value of the stream declines and recovery becomes more difficult. A recycling sorter makes that problem tangible: classification errors, sensor ambiguity, actuator timing, and physical routing all determine whether a material stream remains useful.
The connection to SDG 9 comes through infrastructure and innovation. Recycling systems are not only bins and trucks. They also include sensors, conveyors, optical sorters, magnetic separators, robotics, control software, quality checks, and data systems. This Arduino sorter demonstrates a small version of that infrastructure logic through a transparent, buildable prototype.
The connection to SDG 11 appears through cities and communities. Urban waste systems depend on residents, institutions, haulers, sorting facilities, regulations, and physical infrastructure. A classroom or makerspace sorter cannot solve municipal waste challenges, but it can help people understand why sorting accuracy and contamination control matter for public systems.
The connection to SDG 14 is indirect but meaningful. Materials that are not captured, reused, recycled, or disposed of properly may leak into rivers, storm drains, beaches, and marine systems. Sorting does not replace upstream waste reduction, but it is one layer in the wider effort to prevent material leakage into ecosystems.
Because the Sustainable Development Goals are broad public frameworks, it is important not to overclaim. This project is not a certified recycling machine, not a full materials-recovery facility, and not a substitute for product redesign, reuse systems, packaging policy, or waste prevention. Its value is educational, methodological, and practical: it teaches the sensing-and-routing logic behind material recovery and shows why circularity depends on classification, infrastructure, and accountability.
In that sense, the project works best as a bridge between sustainability language and engineering practice. It turns a broad goal — reduce waste and recover materials responsibly — into a practical sequence: detect an object, read a material signal, classify the item, actuate a diverter, track the outcome, identify misroutes, and improve the system design.
Connections to Other Site Areas
This recycling sorter belongs to a wider body of work on sustainable infrastructure, material systems, and intelligent automation. It connects directly to Intelligent Infrastructure Systems because waste systems increasingly depend on infrastructure that can sense, classify, route, and report material flows.
It also connects to Sustainable Development Goals Within Planetary Boundaries. Waste reduction, responsible consumption, and circular material systems are not only operational problems. They are part of a larger development challenge: meeting human needs while reducing pressure on climate, land systems, freshwater, ecosystems, and synthetic material burdens.
At the planetary-boundary level, this project relates to Novel Entities and the Problem of Synthetic Overload. Plastics, synthetic materials, additives, and complex waste streams create governance and monitoring challenges that require better classification, reduction, reuse, and recovery systems.
The project also supports the broader logic of Planetary Boundaries by showing how practical sensing and automation tools can help reduce material leakage, contamination, and waste-system inefficiency. Small prototypes like this do not solve circularity alone, but they help make material-flow problems visible and testable.
System Architecture
The recycling sorter operates through a simple classification pipeline. First, an object-detection sensor identifies the presence of an item moving through the sorting path. The Arduino then checks whether the inductive sensor detects metal.
If metal is detected, the system directs the object to the metal bin. If metal is not detected, the object is routed to a second category, such as plastic, paper, or general non-metal recyclables, depending on system configuration.
The Arduino then activates a servo motor controlling a sorting gate or diverter. This logic mirrors the fundamental principle used in larger recycling facilities: identify material properties, then automate separation.
At a systems level, the architecture can be summarized as:
Object Input → Sensor Layer → Arduino → Sorting Logic → Servo / Diverter Action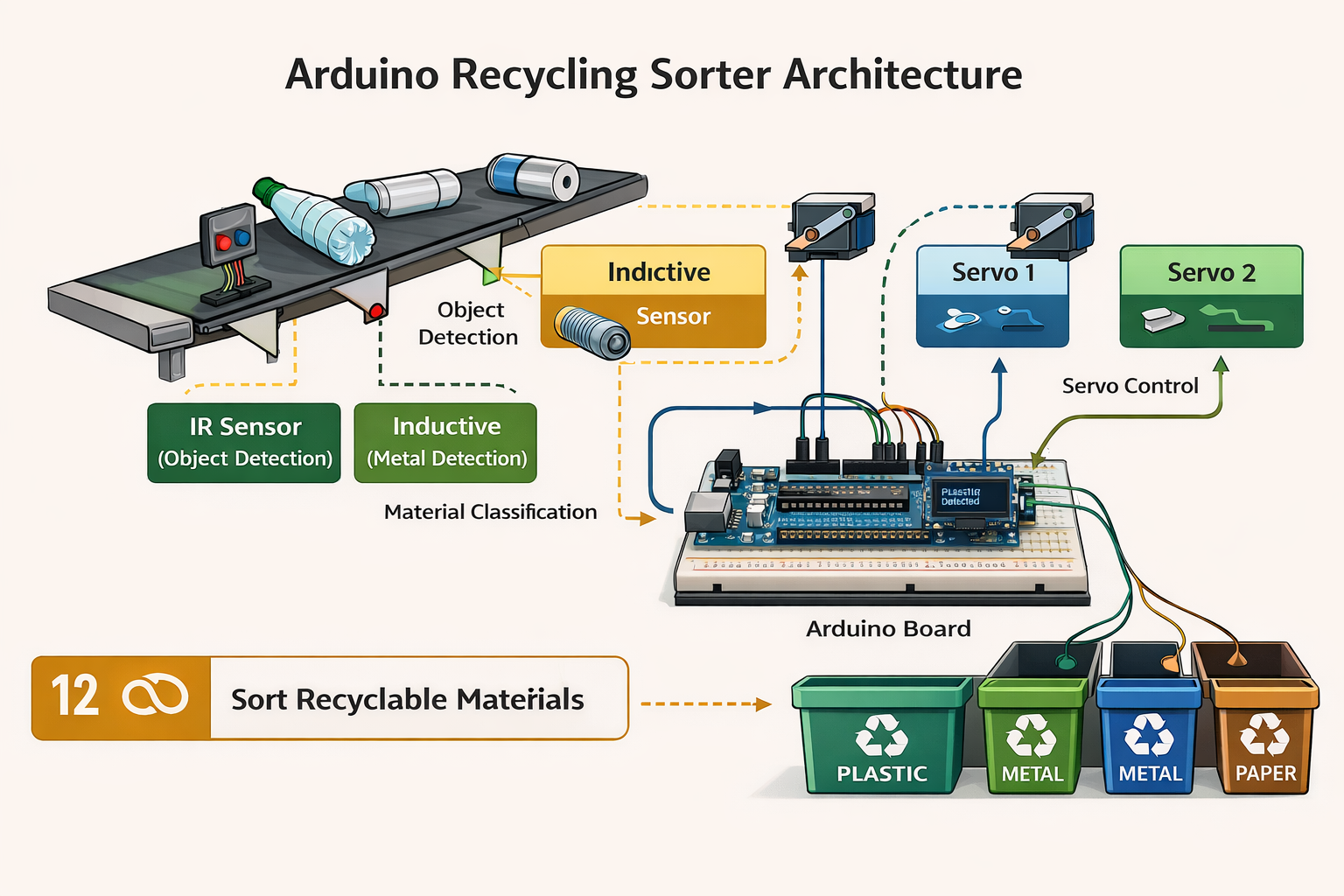
The prototype’s architecture is intentionally simple. It uses a limited classification system to teach the structure of automated sorting rather than pretending to solve the full complexity of modern material recovery.
System Requirements
A recycling sorter becomes more useful when its requirements are explicit. The system must detect object presence, classify a basic material signal, route the object mechanically, and allow the outcome to be evaluated.
| Requirement | Design Target | Reason |
|---|---|---|
| Object detection | Detect when an item enters the sorting path | Sorting logic should activate only when an object is present |
| Material sensing | Distinguish baseline metal from non-metal items | Provides a simple classification task that can be tested and validated |
| Actuator routing | Move a servo gate to route objects into bins | Classification must produce a physical material-flow outcome |
| Gate reset | Return the diverter to neutral after each event | Prevents one item’s routing decision from affecting the next item |
| Power stability | Support servo movement without resetting the Arduino | Servo current spikes can destabilize microcontroller operation |
| Telemetry | Print detected class and gate status | Supports debugging, testing, and classification accuracy analysis |
| Validation | Track detection, classification, and routing outcomes | Sorting systems are only useful when accuracy and failure modes are known |
These requirements can be reused across the Arduino sustainability project series. Each project should make the engineering target visible before moving into code or build steps.
Why an Arduino Recycling Sorter Matters
Waste systems are often discussed at the scale of municipal policy, infrastructure, consumer behavior, and industrial processing. But sorting accuracy is also an engineering problem. If materials are not identified and separated correctly, recycling streams become less efficient and more contamination ends up in landfill.
A prototype sorter like this demonstrates several important ideas:
- embedded sensors can support material-handling decisions
- automation can reduce manual sorting burden in small systems
- low-cost mechatronic systems can model the logic of industrial sorting
- resource recovery depends on both classification and physical routing
- contamination is a measurable systems problem rather than only a behavioral failure
The platform is not an industrial recycling machine. Its value is that it translates the logic of waste sorting into a small, testable embedded system. It gives students, makers, educators, and engineers a practical way to explore sensing, classification, actuation, contamination reduction, and circular material recovery.
It also teaches humility. Recycling is important, but sorting alone cannot fix a material economy built around excessive extraction, disposable design, complex composites, toxic additives, and weak reuse systems. Sorting is one layer in a wider hierarchy that should prioritize reduction, reuse, repair, redesign, and accountable material governance.
System Overview
The recycling sorter uses a combination of sensors to identify material characteristics and control sorting gates.
The system includes:
- infrared or proximity sensing for object detection
- inductive sensing for basic metal detection
- servo-based actuation for sorting gates or diverters
- an Arduino microcontroller managing classification logic
When an object passes the sensors, the Arduino determines a basic routing category and activates the appropriate servo position to redirect the item into the intended bin.
The baseline design sorts metal versus non-metal. That is a deliberately narrow classification problem. More advanced systems could separate additional categories, but each new category requires additional sensing, calibration, physical routing, and validation.
Bill of Materials
- Arduino Uno or compatible microcontroller
- infrared proximity sensor or object-detection sensor
- inductive metal detection sensor
- servo motor
- sorting gate, chute, or diverter mechanism
- breadboard or secure wiring terminals
- jumper wires
- stable power supply
- sorting bins or containers
- test objects representing metal and non-metal categories
Optional additions include extra sensors, additional servo channels, optical color sensing, load cells, camera modules, or more complex chute geometries for multi-bin classification.
For reliable testing, use clean, consistent test objects before moving to mixed or irregular waste. Real waste streams contain dirt, moisture, labels, composites, food residue, and shape variation that can quickly expose prototype limitations.
Engineering Specifications
| Parameter | Reference Design |
|---|---|
| Microcontroller | Arduino Uno, Arduino Nano, or equivalent ATmega328P-compatible board |
| Object detection | Infrared or proximity-based sensing |
| Material detection | Inductive sensor for basic metal classification |
| Actuation | Servo-driven sorting gate or diverter |
| Control model | Threshold-based object-routing logic |
| Power requirement | Stable 5V supply recommended for logic and servo operation |
| Sorting categories | Metal versus non-metal in the baseline design |
| Deployment scope | Educational, prototype, and experimental sorting system |
The reference design should be interpreted as a proof-of-concept sorter. It is appropriate for classroom demonstrations, makerspace testing, and basic mechatronics learning, not for processing contaminated or hazardous waste streams.
Measurement Principle: Object Detection and Material Classification
The recycling sorter uses two kinds of sensing. The first detects whether an object is present in the sorting path. The second provides a material-related signal that can support classification.
The object-detection sensor acts like a trigger. It tells the Arduino that an item has entered the chute or sorting zone. The inductive sensor provides a simple metal-detection signal. If the inductive sensor is activated, the system routes the object to the metal category. If it is not activated, the object is routed to the non-metal category.
This is useful, but limited. An inductive sensor does not distinguish paper, plastic, glass, organic material, composite packaging, or contaminated items. It only supports a basic metal-versus-non-metal branch. That limitation is not a failure of the project; it is an important lesson about classification systems. Every sensor sees only part of the material problem.
Industrial recycling systems often combine many sensing and separation methods, including magnets, eddy-current separators, optical sensors, near-infrared spectroscopy, air jets, density separation, manual quality control, and robotics. This prototype demonstrates the first layer of that logic in a transparent and buildable form.
Mathematical Lens: From Sensor Events to Sorting Accuracy
The recycling sorter can be understood as a simple classification system. An item enters the sorting path, a sensor produces a signal, the firmware assigns a class, and the actuator routes the object into a bin. The system can then be evaluated by comparing the predicted class with the actual material category.
\hat{y}=f(s_{\mathrm{object}},s_{\mathrm{metal}})
\]
Interpretation: The predicted material class \(\hat{y}\) is determined by object-detection and material-sensor signals.
In the baseline design, \(\hat{y}\) is either metal or non-metal. The function is intentionally simple: if an object is present and the metal sensor is active, route to the metal bin; otherwise route to the non-metal bin.
A=\frac{N_{\mathrm{correct}}}{N_{\mathrm{total}}}
\]
Interpretation: Sorting accuracy compares correctly routed items with all tested items.
Accuracy is a useful first metric, but it should not be the only one. A sorter can appear accurate when tested on easy objects and fail badly on mixed, dirty, irregular, or ambiguous materials.
C=\frac{N_{\mathrm{wrong\ stream}}}{N_{\mathrm{stream}}}
\]
Interpretation: Contamination rate measures the fraction of items in a material stream that do not belong there.
Contamination is central to recycling performance because a few wrong items can lower the quality of a material stream. The goal is not only to route some items correctly, but to keep each output stream clean enough to be useful.
R=\frac{N_{\mathrm{recovered}}}{N_{\mathrm{recoverable}}}
\]
Interpretation: Recovery rate compares successfully captured recyclable items with the number that were recoverable in the test set.
Recovery rate asks a different question than contamination rate. It focuses on how much useful material the system actually captures. A conservative sorter may reduce contamination but miss recoverable items; an aggressive sorter may capture more material while increasing contamination.
Q=\frac{N_{\mathrm{items}}}{t}
\]
Interpretation: Throughput measures how many items are sorted per unit time.
The mathematical lens shows why recycling sorting is not only a wiring problem. It is a classification-performance problem. Accuracy, contamination, recovery, and throughput can move in tension with one another, and each must be measured if the sorter is to be improved responsibly.
Circuit Logic, Servo Power, and Sorting-Gate Control
The circuit has three jobs: detect object presence, sense a material-related signal, and move the sorting gate. The Arduino handles logic-level decisions. The sensors provide digital inputs. The servo converts the classification decision into a physical routing action.
This separation matters because servo motors can draw more current than the Arduino board can comfortably supply, especially during movement or mechanical resistance. If the servo is powered poorly, the board may reset, sensor readings may become unstable, or the gate may fail to reach the intended position.
For reliable operation, use a stable 5V power supply for the servo when possible and connect all grounds together. The Arduino, sensors, and servo must share a common ground reference so that signal levels are interpreted correctly.
The gate mechanism is as important as the code. A servo can move to the correct angle while the object still falls into the wrong bin if the chute geometry, gate timing, item speed, or physical alignment is poor. Sorting is a mechanical process, not only a software decision.
How the Recycling Sorter Works
The sorter begins with the gate in a neutral position. When an object enters the sorting path, the object-detection sensor triggers the classification routine. The Arduino then reads the material sensor and determines whether the item should be routed as metal or non-metal.
The servo moves the gate to the corresponding position, allowing the item to pass toward the intended bin. After a short delay, the gate returns to neutral so the system is ready for the next object.
The control loop can be summarized as:
Detect object → Read material signal → Choose category → Move gate → Reset gate → Wait for next itemThis model is intentionally transparent. It does not hide classification behind a complex model. Each decision can be traced to a sensor state, a branch in the firmware, and a servo position.
Design Assumptions and Constraints
This prototype assumes:
- a low-throughput sorting path
- one item entering the chute at a time
- consistent object speed and position
- clean test objects with known categories
- metal versus non-metal classification as the baseline task
- educational, laboratory, or prototype use
- manual supervision during testing
It also assumes that the object passes close enough to the sensors for reliable detection. If items are too far from the sensors, move too quickly, arrive in clusters, or vary greatly in shape, classification and routing reliability will decline.
Real recycling streams are far more complex. Materials may be dirty, wet, crushed, multilayered, mislabeled, hazardous, or made from composites. A responsible article must acknowledge that this prototype teaches a sorting principle; it does not solve real-world waste classification by itself.
Wiring the Arduino Recycling Sorter
The sensors and servo motor connect to the Arduino through simple digital and signal lines.
- Infrared sensor VCC → Arduino 5V
- Infrared sensor GND → Arduino GND
- Infrared sensor OUT → Arduino pin 2
- Metal sensor OUT → Arduino pin 3
- Servo motor signal → Arduino pin 9
- Servo power → stable 5V supply
- All grounds → common GND
The servo motor controls a gate that redirects materials into the appropriate bins. Use a stable external 5V supply for the servo when possible, since servo movement can introduce current spikes that affect microcontroller stability. When using a separate servo power supply, make sure the servo ground and Arduino ground are connected.
Before testing with moving objects, verify the gate positions slowly and manually. A servo that moves in the wrong direction can route items incorrectly or bind against the chute.
Mechanical and Deployment Considerations
Sorting systems are physical systems. Sensor logic may be correct while the sorter still fails because the object bounces, rolls, stalls, tips, skips past the gate, or enters at the wrong angle.
For better reliability:
- use a chute that guides objects past the sensors consistently
- test one item at a time before increasing throughput
- mount sensors securely so their angle does not drift
- ensure the gate has enough clearance to move freely
- avoid overloading the servo with heavy or jammed objects
- keep bins aligned with the actual exit path of sorted items
- record misroutes and jams rather than treating them as random errors
Mechanical design should be treated as part of the intelligence of the system. A well-shaped chute can make classification easier. Poor geometry can defeat even correct code.
Firmware Design Goals
The firmware in this project is designed to do more than trigger a servo on a single sensor event. It incorporates basic automation design practices such as:
- object presence detection
- material-dependent branching logic
- clear actuator positions for sorting states
- serial output for debugging and observation
- reset behavior after each sorting event
- simple timing control to avoid repeated triggers from the same item
These choices make the sorter easier to test, easier to calibrate, and easier to extend later into more advanced classification systems.
Basic vs. Advanced Firmware
A minimal recycling sorter could read one sensor and move a servo to one of two positions. That simple version is useful for a first demonstration, but it does not clearly separate object detection, material classification, actuator control, reset timing, or debugging.
The advanced version used here makes the control flow explicit, defines reusable gate positions, adds serial telemetry, and resets the gate after each sorting event. These additions make the prototype easier to validate and easier to adapt for additional sensors, categories, or sorting mechanisms.
The larger lesson for the project series is that code should teach the architecture of a system. A sustainability prototype should show not only how to move a servo, but how to connect sensing, classification, actuation, and evidence of performance.
Advanced Arduino Code
The firmware below improves on the simplest possible sorter by making the control flow explicit, defining reusable servo positions, adding serial telemetry, and ensuring the sorting gate resets after each routing event.
/*
Arduino Recycling Sorter
Detects:
- Object presence using an infrared or proximity sensor
- Basic metal classification using an inductive sensor
Controls:
- A servo-driven sorting gate or diverter
Notes:
- This is prototype firmware for education and experimental sorting systems.
- Industrial recycling requires more advanced sensing, safety controls,
mechanical design, contamination handling, and validation.
*/
#include <Servo.h>
// Sensor input pins.
const int irSensorPin = 2;
const int metalSensorPin = 3;
// Servo signal pin.
const int servoPin = 9;
// Servo positions.
// Adjust these values after testing the physical chute and gate geometry.
const int gateCenterPosition = 90;
const int gateMetalPosition = 120;
const int gateNonMetalPosition = 45;
// Timing values.
const unsigned long sortingDelayMs = 2000;
const unsigned long resetDelayMs = 500;
// Create servo object.
Servo sortingServo;
void setup() {
// Configure sensor pins as inputs.
pinMode(irSensorPin, INPUT);
pinMode(metalSensorPin, INPUT);
// Attach servo and move gate to neutral position.
sortingServo.attach(servoPin);
sortingServo.write(gateCenterPosition);
// Start serial monitor for debugging and observation.
Serial.begin(9600);
Serial.println("Arduino Recycling Sorter initialized.");
Serial.println("Waiting for objects...");
Serial.println("------------------------------------");
}
void loop() {
// Read object-detection sensor.
int objectDetected = digitalRead(irSensorPin);
// Only classify when an object is detected.
if (objectDetected == HIGH) {
classifyAndSortObject();
// Brief delay to reduce repeated triggering from the same object.
delay(resetDelayMs);
}
}
void classifyAndSortObject() {
// Read material sensor after object detection.
int metalDetected = digitalRead(metalSensorPin);
if (metalDetected == HIGH) {
// Route detected metal items to the metal bin.
Serial.println("Object detected: METAL");
sortingServo.write(gateMetalPosition);
} else {
// Route non-metal items to the alternate bin.
Serial.println("Object detected: NON-METAL");
sortingServo.write(gateNonMetalPosition);
}
// Allow time for the object to pass through the sorting gate.
delay(sortingDelayMs);
// Return the gate to the neutral center position.
sortingServo.write(gateCenterPosition);
Serial.println("Gate reset to neutral position.");
Serial.println("------------------------------------");
}GitHub Repository
The article body includes the core firmware and design explanation so the build remains readable. The full repository expands the project into a reproducible prototype package, including Arduino control firmware, setup documentation, calibration notes, deployment guidance, bill of materials, example sorting events, and wiring materials.
Complete Code Repository
The full code distribution for this project, including Arduino control firmware, setup documentation, calibration notes, deployment guidance, bill of materials, and example sorting events, is available on GitHub.
The repository contains the complete prototype build materials:
- Arduino control firmware
- bill of materials
- setup guide
- calibration notes
- deployment notes
- example sorting events
Repository Structure
arduino-recycling-sorter/
README.md
LICENSE
BOM.csv
firmware/
recycling_sorter.ino
docs/
setup_guide.md
calibration.md
deployment_notes.md
data/
example_sorting_events.csv
hardware/
Engineers can clone the repository, fork the design, or download the complete project using GitHub’s Download ZIP feature. All materials are released under the MIT License to support reuse in research, education, and prototype engineering work.
Engineering Notes
A few technical considerations are important in this build:
- Sensor placement: object-detection reliability depends strongly on the position and angle of the sensor relative to the item path.
- Metal detection limits: an inductive sensor provides only basic metal discrimination and does not perform full material recognition.
- Servo repeatability: gate position must be mechanically consistent for accurate routing.
- Throughput constraints: the sorter works best with low item throughput and predictable object geometry.
- Physical system dependence: chute design and gate alignment matter as much as the control logic.
- Power stability: servo current spikes can cause resets or unstable readings if the power supply is undersized.
Because of these constraints, the prototype should be understood as a basic material sorting system, not a full industrial recycling intelligence platform.
In more advanced implementations, the system could add optical sensing, load-cell measurements, machine vision, multiple gates, bin-full detection, or data logging for each sorting event.
Failure Modes and Practical Risks
A useful recycling-sorter article should explain not only how the system works, but how it can fail. Sorting systems fail through sensor errors, mechanical errors, and material ambiguity.
- Missed object detection: an item may pass through without triggering the object sensor.
- Repeated triggering: one object may trigger multiple events if reset timing is poor.
- False metal detection: the inductive sensor may respond unexpectedly to nearby metal hardware or sensor placement.
- Missed metal detection: metal objects may be too far from the sensor or pass too quickly for reliable detection.
- Non-metal ambiguity: plastic, paper, glass, and composites may all look the same to a simple binary sorter.
- Gate misalignment: the servo may move correctly while the object still falls into the wrong bin.
- Mechanical jamming: irregular objects can jam the chute or gate.
- Power instability: servo current spikes can reset the Arduino or produce inconsistent behavior.
- False confidence: success with clean classroom objects may not translate to real waste streams.
These risks do not undermine the project. They make the engineering lesson stronger. Sorting is not solved by adding one sensor. It requires careful attention to material variability, sensor limits, mechanical routing, throughput, and validation.
Validation and Testing
To bring this project closer to engineering-grade documentation, validation should include:
- verify that the object-detection sensor triggers reliably when items enter the sorting path
- confirm that the metal sensor correctly distinguishes intended test items
- verify that servo routing positions consistently direct objects into the correct bins
- test repeated sorting cycles to observe mechanical consistency
- evaluate whether objects of different sizes, shapes, or speeds cause misroutes
- check system stability under repeated servo actuation
- record false positives, false negatives, jams, and wrong-bin outcomes
If the sorter misclassifies objects, the cause may be mechanical or sensing-related rather than purely algorithmic. Sensor thresholds, chute geometry, object spacing, servo power, and gate alignment all affect performance.
Example Sorting Test Record
| Test Item | Actual Category | Predicted Category | Routed Correctly? | Likely Issue |
|---|---|---|---|---|
| Aluminum can | Metal | Metal | Yes | Clean detection |
| Steel bottle cap | Metal | Non-metal | No | Passed too far from sensor |
| Plastic bottle | Non-metal | Non-metal | Yes | Baseline non-metal routing |
| Paper cup with foil lining | Composite | Non-metal | Ambiguous | Composite material beyond baseline classification |
| Cardboard piece | Non-metal | Non-metal | No | Gate bounce sent item into wrong bin |
A validation record like this helps transform the sorter from a demonstration into a design process. The next improvement can then be based on evidence: sensor placement, gate geometry, material categories, object speed, or firmware timing.
Suggested Performance Metrics
For a more rigorous evaluation, the sorter can be assessed using several simple metrics:
- Detection reliability: whether objects are consistently detected when entering the sorting path.
- Classification accuracy: whether metal and non-metal items are identified correctly.
- Sorting success rate: whether items physically reach the intended bin.
- False classification rate: how often objects are misidentified.
- Contamination rate: how often the output stream contains items that do not belong there.
- Recovery rate: how many recoverable items are successfully routed into the intended stream.
- Actuator repeatability: whether the sorting gate returns to correct positions over repeated cycles.
- Throughput stability: whether sorting quality changes as item spacing or speed changes.
Even informal tracking of these metrics makes the prototype more useful as an engineering system. Recycling performance is not a feeling; it can be measured through accuracy, contamination, recovery, and throughput.
Data Logging Extension
The sorter becomes more useful when each sorting event is logged. Even a simple CSV file can help evaluate whether errors are caused by material ambiguity, sensor placement, object speed, servo timing, or mechanical routing.
| Field | Example | Purpose |
|---|---|---|
| timestamp | 2026-05-28 09:15:00 | Records when the sorting event occurred |
| object_detected | true | Documents whether the object sensor triggered |
| metal_detected | true | Documents the material-sensor signal |
| predicted_class | metal | Records the firmware classification |
| actual_class | metal | Records the known test category |
| routed_bin | metal bin | Documents physical routing result |
| outcome | correct | Supports accuracy and contamination calculations |
| notes | slight gate bounce | Preserves qualitative engineering observations |
Data logging is especially useful because sorting errors can be hard to diagnose after the fact. A log preserves the relationship among sensor signals, predicted categories, physical routing, and observed outcomes.
Applications
Automated sorting systems have a wide range of educational, engineering, and sustainability applications:
- educational demonstrations of recycling technology
- prototyping circular economy systems
- testing sensor classification methods
- teaching embedded systems engineering
- experimenting with automated waste management
- demonstrating mechatronics, sensing, and actuation
- exploring contamination reduction in material streams
- comparing classification accuracy across sensor configurations
Small prototypes like this allow engineers to explore waste-classification techniques before scaling to more complex systems. In a more advanced architecture, sensor events could be logged, analyzed, and used to compare sorting accuracy, throughput, contamination rates, and material recovery performance.
Future Improvements
Several upgrades could significantly expand this prototype:
- optical color sensing for additional material cues
- load-cell measurement for weight-based classification
- camera-based object recognition
- multiple servo gates for more than two bins
- bin-full sensing
- SD card logging of sorting events
- wireless telemetry for sorting performance
- improved chute geometry for consistent item presentation
- conveyor-based item spacing
- machine learning classification for controlled test sets
Each additional feature introduces new validation needs. More categories do not automatically make a sorter better if the added sensors are unreliable or the physical routing becomes less consistent.
Responsible Deployment
This prototype is appropriate for classrooms, makerspaces, robotics labs, sustainability education, and controlled demonstrations. It should not be used for hazardous waste, contaminated materials, food-soiled waste, sharp objects, batteries, e-waste, medical waste, or unsupervised public sorting without major redesign and safety review.
Responsible deployment means matching the system to the consequence of error. A classroom sorter can misroute a clean test object without serious harm. A real waste system may expose users to sharp objects, biological residue, fire hazards, toxic materials, batteries, or contaminated packaging. Sorting automation must therefore be treated as a safety and governance problem, not only a coding challenge.
A responsible version should include clear material restrictions, guarded moving parts, stable power, jam handling, maintenance access, bin labeling, emergency stop behavior if motorized components are added, and a plan for what happens when the system cannot classify an item confidently.
Supporting SDG 12: Responsible Consumption and Production
Responsible consumption requires more than reducing waste. It also requires building systems that recover materials efficiently. Recycling systems must be able to identify, separate, and process materials without excessive contamination.
Automation technologies play an important role in improving these processes. Sensor-based classification systems reduce sorting errors and improve recycling efficiency when they are designed, calibrated, and validated carefully. They can also make the mechanics of circular material systems easier to understand in classrooms, labs, and prototype engineering environments.
Embedded systems like this Arduino recycling sorter demonstrate how accessible technologies can contribute to more sustainable waste infrastructure. They also show how sustainability work can move from abstract commitments into practical classification, routing, measurement, and material-recovery design.
The deeper lesson is that circularity depends on feedback. A material stream cannot be improved if contamination is invisible, if misroutes are not recorded, and if classification errors are not measured. Sorting systems become more responsible when they are designed not only to move objects, but to reveal where material recovery succeeds and where it fails.
Reproducibility
All firmware, documentation, and supporting build materials necessary to reproduce the prototype are included in the project repository. The design intentionally relies on widely available educational and hobbyist hardware so that it can be rebuilt in classrooms, labs, and independent engineering environments.
The sorter is intended as a reference implementation rather than an industrial recycling machine. Engineers adapting it for more demanding use should validate sensor behavior, actuator endurance, chute geometry, throughput limits, power stability, and sorting consistency under real operating conditions.
For the rest of this project series, reproducibility should mean more than making code available. Each article should include a clear bill of materials, wiring logic, calibration notes, failure modes, test procedure, data interpretation guidance, and a realistic statement of appropriate use.
Conclusion
Building a smart recycling sorter with Arduino illustrates how embedded systems can support better waste management. By combining sensors, classification logic, and automated sorting gates, the system demonstrates the core principles used in modern recycling infrastructure.
Although this prototype is small, it reflects an important sustainability insight: technology can make resource systems more intelligent only when classification, validation, and material context are taken seriously. When materials are sorted accurately, recycling systems become more efficient, contamination can be reduced, and circular economies become more achievable.
For classrooms, makerspaces, engineering labs, and sustainability education, the project provides a practical way to explore how sensing, actuation, and evidence-based evaluation can support circular-material systems.
The deeper lesson is not simply that an Arduino can move a sorting gate. The deeper lesson is that responsible material systems require feedback. When sorting decisions are tied to measurement, validation, contamination tracking, and realistic limits, even a small prototype can demonstrate the logic of more intelligent waste infrastructure.
Related Articles
- Arduino Projects for Sustainable Development: 10 SDG-Aligned Builds
- Intelligent Infrastructure Systems
- Sustainable Development Goals Within Planetary Boundaries
- Novel Entities and the Problem of Synthetic Overload
- Planetary Boundaries
Further Reading
- Arduino (n.d.) Servo Library. Available at: https://docs.arduino.cc/libraries/servo/
- Arduino (n.d.) digitalRead(). Available at: https://docs.arduino.cc/language-reference/en/functions/digital-io/digitalread/
- Ellen MacArthur Foundation (n.d.) What is a circular economy? Available at: https://www.ellenmacarthurfoundation.org/topics/circular-economy-introduction/overview
- OECD (2022) Global Plastics Outlook: Economic Drivers, Environmental Impacts and Policy Options. Available at: https://www.oecd.org/environment/plastics/
- United Nations (n.d.) Sustainable Development Goal 12: Responsible Consumption and Production. Available at: https://sdgs.un.org/goals/goal12
- United Nations Environment Programme (2021) From Pollution to Solution: A Global Assessment of Marine Litter and Plastic Pollution. Available at: https://www.unep.org/resources/pollution-solution-global-assessment-marine-litter-and-plastic-pollution
- U.S. Environmental Protection Agency (n.d.) Reduce, Reuse, Recycle. Available at: https://www.epa.gov/recycle
- U.S. Environmental Protection Agency (n.d.) Sustainable Materials Management. Available at: https://www.epa.gov/smm
References
- Arduino (n.d.) Servo Library. Available at: https://docs.arduino.cc/libraries/servo/
- Arduino (n.d.) digitalRead(). Available at: https://docs.arduino.cc/language-reference/en/functions/digital-io/digitalread/
- Ellen MacArthur Foundation (n.d.) What is a circular economy? Available at: https://www.ellenmacarthurfoundation.org/topics/circular-economy-introduction/overview
- OECD (2022) Global Plastics Outlook: Economic Drivers, Environmental Impacts and Policy Options. Available at: https://www.oecd.org/environment/plastics/
- United Nations (n.d.) The 17 Sustainable Development Goals. Available at: https://sdgs.un.org/goals
- United Nations (n.d.) Sustainable Development Goal 4: Quality Education. Available at: https://sdgs.un.org/goals/goal4
- United Nations (n.d.) Sustainable Development Goal 9: Industry, Innovation and Infrastructure. Available at: https://sdgs.un.org/goals/goal9
- United Nations (n.d.) Sustainable Development Goal 11: Sustainable Cities and Communities. Available at: https://sdgs.un.org/goals/goal11
- United Nations (n.d.) Sustainable Development Goal 12: Responsible Consumption and Production. Available at: https://sdgs.un.org/goals/goal12
- United Nations (n.d.) Sustainable Development Goal 14: Life Below Water. Available at: https://sdgs.un.org/goals/goal14
- United Nations Environment Programme (2021) From Pollution to Solution: A Global Assessment of Marine Litter and Plastic Pollution. Available at: https://www.unep.org/resources/pollution-solution-global-assessment-marine-litter-and-plastic-pollution
- U.S. Environmental Protection Agency (n.d.) Reduce, Reuse, Recycle. Available at: https://www.epa.gov/recycle
- U.S. Environmental Protection Agency (n.d.) Sustainable Materials Management. Available at: https://www.epa.gov/smm