
Last Updated May 12, 2026
Firmware, hardware abstraction, and device control examine how embedded software initializes hardware, manages peripherals, coordinates low-level state, and exposes device behavior to higher layers of an embedded system. In embedded computing, this layer is where silicon capabilities become usable system functions. It is also where poor design choices can turn otherwise capable hardware into brittle, opaque, power-wasteful, timing-unstable, or unmaintainable devices.
Embedded systems do not operate through hardware alone. A processor, timer block, ADC, serial interface, sensor bus, storage device, power-management unit, actuator, or radio is only a potential capability until software configures it, sequences it, and controls its state over time. Firmware is the layer that performs this work. It initializes clocks, configures memory and interrupts, programs peripherals, manages timing, handles exceptional conditions, coordinates data flow, and defines how hardware resources become system behavior.
Hardware abstraction enters because direct control of hardware registers is powerful but costly when systems grow. A project written entirely around device-specific register layouts may be efficient in the short term, yet hard to port, test, reuse, verify, or maintain across boards and silicon families. A project abstracted too heavily may become elegant on paper but too opaque, wasteful, or timing-insensitive in deployment. Embedded software architecture therefore has to balance proximity to hardware with disciplined layering.
Device control is the operational expression of that balance. It includes the logic by which firmware sequences boot, configures interfaces, reacts to interrupts, reads and writes device registers, drives sensors and actuators, manages power states, coordinates reset and recovery, and mediates access to peripherals from higher-level software. In mature embedded systems, this layer is not simply a bag of drivers. It is the control surface through which the device becomes legible to the rest of the architecture.
Main Library
Publications
Article Map
Embedded & Edge Systems
Related Topic
Data Systems & Analytics
Related Topic
Intelligent Infrastructure
Related Topic
Environmental Monitoring
The engineering question is therefore not merely how to write to hardware registers. It is how to create a controlled, testable, maintainable, timing-aware, power-aware, and diagnosable interface between physical hardware and software behavior. A good firmware architecture makes hardware usable without making the system blind to the constraints that hardware imposes.
Engineering Problem
The engineering problem is how to make hardware controllable without making the system brittle, opaque, or unnecessarily device-specific. Embedded firmware must operate close enough to hardware to preserve timing, state, power, register-level correctness, and fault semantics, while also exposing stable interfaces that higher-level software can use safely. That tension is the core of firmware architecture.
A simple embedded program may configure a few registers directly and run forever in a loop. That can work for small devices. But as systems grow, direct register manipulation scattered across the codebase becomes a source of failure. Multiple modules may compete for the same peripheral. One module may assume a clock is enabled while another suspends it. A driver may block in an interrupt-sensitive path. A sensor may require precise power sequencing that is hidden behind an over-simple API. A firmware update may change initialization order and break a peripheral that previously worked by accident.
A rigorous firmware design should be able to answer several questions. Who owns each peripheral? Which initialization order is required? Which APIs may block? Which functions are interrupt-safe? Which hardware states are visible to higher layers? Which state transitions are allowed? What happens when a peripheral fails to initialize? How are suspend and resume coordinated? What diagnostic evidence remains after reset, brownout, watchdog recovery, bus timeout, failed update, or hardware revision change?
The central challenge is not simply controlling hardware. It is controlling hardware through interfaces that preserve timing clarity, ownership, recoverability, power-state correctness, version compatibility, and long-term maintainability.
Reference Architecture
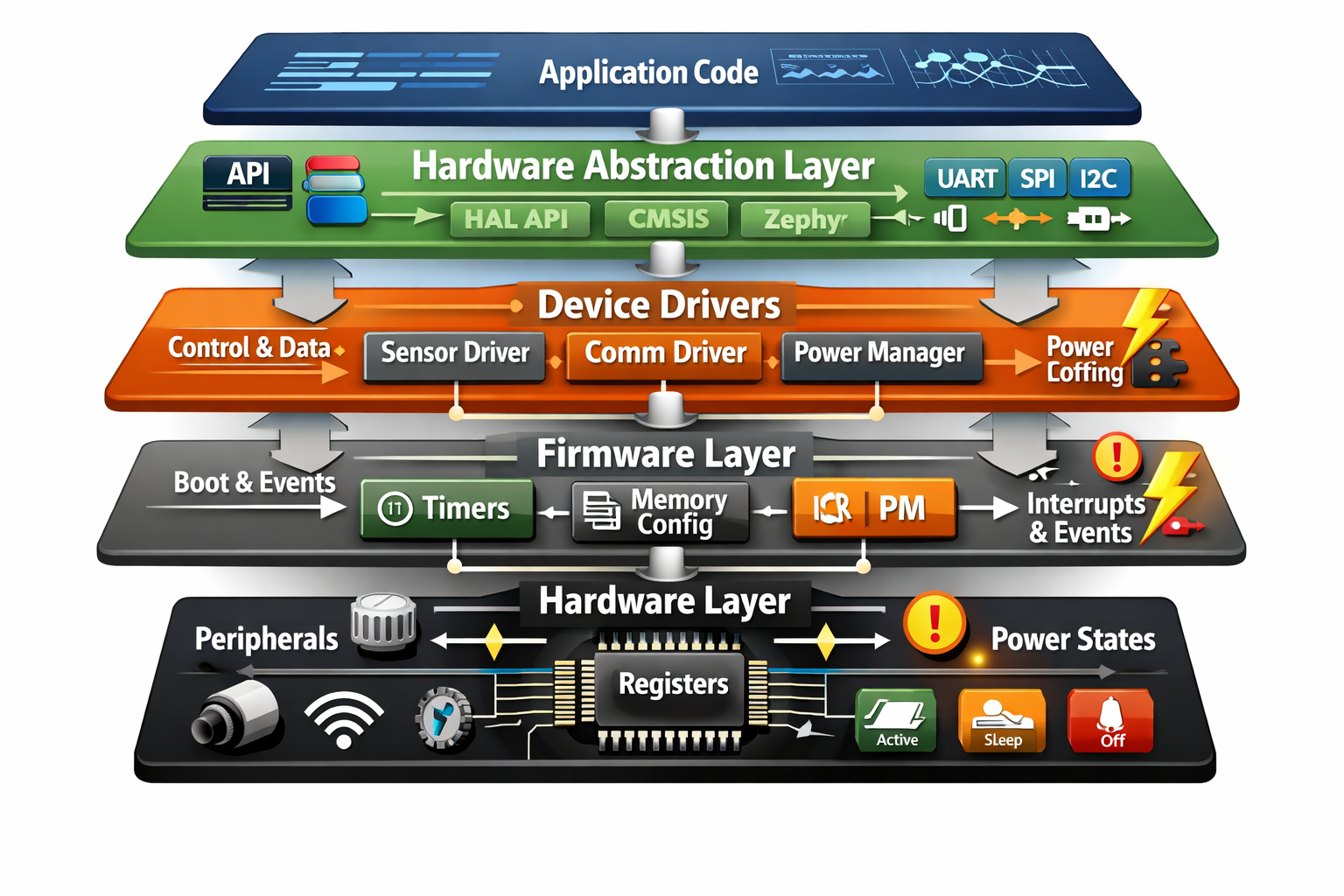
A practical firmware and device-control architecture can be understood as a layered control stack. The exact implementation may use bare-metal startup code, CMSIS-style processor support, board support packages, hardware abstraction layers, RTOS drivers, device trees, bus frameworks, interrupt controllers, runtime power management, bootloaders, and telemetry systems. The architectural responsibilities remain consistent.
| Layer | Engineering Role | Control Concern | Evidence Artifact |
|---|---|---|---|
| Reset and startup layer | Establishes initial execution, vector tables, stack, memory, clocks, and boot assumptions | Startup order, reset cause, memory initialization, early faults | Startup file, linker script, reset log, boot trace |
| Processor support layer | Defines core register access, exception names, interrupt primitives, and system initialization conventions | Portability across MCU families, exception semantics, clock initialization | CMSIS files, device headers, system initialization documentation |
| Board support layer | Maps silicon capabilities to a specific board, pinout, oscillator, power tree, and peripheral wiring | Pin muxing, external components, board-specific timing, regulator behavior | Board manifest, schematic mapping, pin-control table |
| HAL layer | Provides controlled access to low-level hardware operations without exposing every register directly | Abstraction boundary, latency, portability, testability, access discipline | HAL API, register access policy, portability matrix |
| Driver layer | Implements device-specific behavior and exposes usable APIs to higher software | Initialization, blocking behavior, error handling, interrupt safety, concurrency | Driver contract, state machine, API documentation, tests |
| Device model layer | Organizes configured devices, instances, dependencies, initialization order, and runtime state | Ownership, lifecycle, suspend/resume, dependency ordering | Device tree, driver instance data, dependency graph, lifecycle policy |
| Interrupt and event layer | Transforms hardware events into bounded software work | Latency, ISR duration, deferred work, queue ownership, race conditions | Interrupt map, latency budget, event queue policy |
| Power-management layer | Coordinates device suspend, resume, runtime PM, low-power readiness, and wake behavior | Power-state correctness, dependency order, wake sources, retained state | PM policy, suspend/resume test, power-state telemetry |
| Diagnostics layer | Records faults, reset causes, initialization failures, driver errors, update results, and runtime anomalies | Field evidence, root-cause analysis, serviceability, update safety | Fault log, reset-cause record, telemetry schema, crash record |
| Application interface layer | Exposes device capability to higher-level logic through stable service interfaces | API stability, capability boundaries, timing assumptions, error semantics | Interface contract, integration test, application-facing API |
This architecture separates hardware access from hardware governance. A system is not well designed merely because it can toggle pins or read sensors. It is well designed when hardware control is ordered, observable, recoverable, power-aware, version-aware, and constrained by explicit interfaces.
Implementation Pattern
A rigorous implementation begins with a control model before driver code proliferates. The system should identify hardware ownership, initialization order, register access boundaries, interrupt behavior, power-state behavior, dependency relationships, diagnostic evidence requirements, and update compatibility assumptions.
| Artifact | Purpose | Typical Format |
|---|---|---|
| Hardware control inventory | Lists all peripherals, buses, interrupts, clocks, GPIOs, regulators, memory regions, and external devices | YAML, CSV, board manifest, schematic-derived table |
| Initialization sequence | Defines reset, clock, memory, pin, bus, driver, diagnostics, and application startup order | Boot diagram, Markdown, startup test |
| Register access policy | Defines which layers may access registers directly and which must use HAL or driver APIs | Architecture note, code review checklist |
| Driver interface contract | Defines initialization, read/write behavior, errors, blocking semantics, ISR safety, timeout behavior, and power-state assumptions | Header comments, API docs, test plan |
| Device lifecycle policy | Defines init, open, configure, active, idle, suspend, resume, reset, fault, recovery, and remove behavior | State machine, YAML, driver model document |
| Interrupt and deferred-work policy | Defines ISR responsibilities, queue behavior, callbacks, priorities, shared-state rules, and latency budgets | Latency table, interrupt map, RTOS work-queue policy |
| Power-management contract | Defines runtime PM, dependencies, allowed low-power states, wake sources, retained state, and suspend/resume ordering | PM policy, device tree notes, power-state test |
| Fault and diagnostic schema | Defines how initialization failures, driver errors, reset causes, bus faults, power-state failures, and runtime anomalies are recorded | SQL, JSON Schema, telemetry contract |
| Update and rollback policy | Defines how firmware updates preserve device compatibility and recover from interrupted or failed updates | Bootloader policy, manifest, release checklist |
| Hardware-in-the-loop validation plan | Tests startup, interrupts, suspend/resume, bus failure, timeout, update, and power-state behavior on real hardware | HIL script, lab procedure, regression checklist |
The implementation goal is to make the device’s control structure explicit. Engineers should be able to determine which code owns a peripheral, how that peripheral is initialized, what state it is in, what higher layers may assume, how failures are reported, and how the device behaves across reset, sleep, wake, update, and fault recovery.
Research-Grade Framing: Firmware as the Operational Substrate of Embedded Systems
Firmware should be framed as the operational substrate of embedded systems. It is not merely low-level glue. It is the layer that turns physical capability into controlled behavior. It determines which hardware resources exist as software capabilities, which errors are visible, which timing assumptions are enforceable, which power states are safe, and which parts of the device remain maintainable over time.
This framing matters because firmware failures often appear elsewhere. A bad driver contract may look like an application bug. A weak interrupt policy may look like an RTOS scheduling problem. Poor power-state sequencing may look like a hardware defect. Missing reset evidence may make field failures impossible to diagnose. Firmware architecture therefore shapes the quality of the entire embedded system.
| Firmware Dimension | Question | Required Evidence |
|---|---|---|
| Control authority | Is it clear which layer owns each hardware resource? | Ownership map, driver registry, register access policy |
| Timing clarity | Are blocking calls, ISR-safe functions, deadlines, and latency-sensitive paths documented? | API contract, timing budget, latency test |
| State integrity | Are device states explicit and validated across transitions? | State machine, suspend/resume test, reset recovery test |
| Abstraction fitness | Does the HAL hide unnecessary variation without hiding essential constraints? | Portability matrix, code review, interface audit |
| Fault visibility | Can initialization failure, bus fault, timeout, interrupt anomaly, and reset cause be diagnosed? | Fault log, telemetry, reset-cause record |
| Power correctness | Do drivers cooperate with runtime power management and wake behavior? | PM contract, sleep-residency report, dependency graph |
| Lifecycle maintainability | Can firmware evolve without breaking hardware assumptions? | Manifest, update policy, compatibility tests |
In this framing, firmware quality is not measured only by whether hardware functions under nominal conditions. It is measured by whether the system remains controllable, explainable, testable, recoverable, secure, and evolvable when real embedded constraints appear.
Formal Model: Hardware State, Control Authority, and Abstraction Boundaries
A useful formal model separates hardware state, firmware control actions, abstraction interfaces, and externally visible behavior. Let \(H(t)\) represent hardware state, \(C(t)\) firmware control action, \(A(\cdot)\) the abstraction interface exposed to higher layers, \(S(t)\) firmware-maintained software state, and \(Y(t)\) the device behavior observed by the application or external system.
H(t+1) = f(H(t), C(t), E(t))
\]
Interpretation: Hardware state evolves from the previous hardware state, firmware control action, and external events \(E(t)\), such as interrupts, bus activity, power transitions, or physical inputs.
Y(t) = A(H(t), S(t))
\]
Interpretation: Higher-level software sees hardware through an abstraction \(A\), shaped by hardware state \(H(t)\) and firmware-maintained software state \(S(t)\). A poor abstraction exposes too much noise or hides too much constraint.
C(t) \in \{\text{init}, \text{configure}, \text{read}, \text{write}, \text{enable}, \text{disable}, \text{suspend}, \text{resume}, \text{reset}\}
\]
Interpretation: Device control consists of bounded actions over hardware state. Strong firmware makes these actions explicit and prevents unauthorized or ambiguous state mutation.
L_{\mathrm{path}} = L_{\mathrm{api}} + L_{\mathrm{driver}} + L_{\mathrm{bus}} + L_{\mathrm{device}} + L_{\mathrm{isr}}
\]
Interpretation: Control-path latency includes API overhead, driver logic, bus transaction time, device response time, and interrupt latency. Abstraction decisions must preserve awareness of timing-critical paths.
This model makes the architectural tension visible. Firmware must simplify hardware use through abstraction, but the abstraction must still preserve the timing, ownership, state, power, lifecycle, and fault semantics that determine whether the device behaves correctly.
What Are Firmware, Hardware Abstraction, and Device Control?
Firmware is the persistent low-level software that governs an embedded device’s behavior. It typically resides in flash or other non-volatile memory and is responsible for startup, initialization, peripheral configuration, timing, state management, exception handling, power-state transitions, diagnostics, and ongoing device behavior.
Hardware abstraction refers to software layers that present hardware through stable interfaces rather than exposing every detail of device-specific registers and implementation quirks directly to higher-level code. This can include processor support libraries, board support packages, HALs, driver APIs, device models, and operating-system services. The purpose is not to erase hardware reality. The purpose is to expose hardware in a disciplined form that supports portability, control, testing, and maintainability.
Device control is the practical coordination of hardware capabilities through firmware and abstraction layers. It includes enabling clocks, setting up buses, configuring GPIO, programming timers, handling interrupts, putting devices into low-power modes, resetting or recovering peripherals, and exposing operations through driver APIs or service interfaces.
Together, these layers determine whether an embedded device is controllable, understandable, and portable. They shape not only how hardware is used, but how future software can evolve around that hardware without destabilizing the system.
Firmware as Persistent Embedded Logic
Firmware is often described as software close to hardware, but that phrase can obscure how much architectural responsibility firmware actually carries. Firmware is not limited to writing a few registers and launching an application. It establishes the device’s basic operating reality: reset handling, clock selection, memory initialization, startup sequencing, interrupt configuration, fault response, peripheral activation, diagnostic behavior, and often update or recovery flow.
This makes firmware the first durable expression of system design in an embedded product. Higher-level code may change more often, but firmware usually defines the hardware contract on which the rest of the system depends. If clock initialization is fragile, bus timing is misconfigured, interrupt routing is unclear, peripheral ownership is ambiguous, or fault handling is inconsistent, the problems propagate upward. Conversely, disciplined firmware can make even constrained devices stable and predictable.
In many embedded systems, firmware also persists across product lifecycles more stubbornly than application code. It must survive field updates, recover from interruptions, and support future maintenance without assuming ideal laboratory conditions. A firmware layer that works only on the bench but leaves no evidence after reset, brownout, failed initialization, or driver fault is not operationally mature.
For that reason, firmware should be treated as infrastructure rather than disposable glue code. It should be versioned, tested, documented, observed, and governed with the same seriousness as any other system-critical layer.
Hardware Abstraction Layers
A hardware abstraction layer, or HAL, sits between raw hardware details and higher software layers. Its purpose is not to eliminate all knowledge of hardware, but to control how that knowledge is exposed. A good HAL gives the rest of the system a stable vocabulary for interacting with processors, interrupts, buses, timers, memory, and peripherals. A poor HAL merely hides complexity without containing it.
The value of abstraction is clearest when systems must support portability, reuse, testability, or multiple hardware variants. A HAL can keep application logic from depending on exact register addresses, bit positions, interrupt names, or bus initialization details. It can also make mock testing, simulation, or cross-board portability more practical.
Yet abstraction is never free. Every layer can impose overhead in memory, latency, indirection, build complexity, or debugging difficulty. If the abstraction boundary is poorly chosen, developers may lose the ability to reason about timing, resource ownership, power state, or hardware-specific faults. Embedded abstraction must therefore remain proportionate.
The right question is not whether a HAL is elegant. The right question is whether it simplifies the system while preserving the constraints that govern the device: timing, power, state, concurrency, bus behavior, interrupt semantics, and fault visibility.
Device Control as an Architectural Layer
Device control is the operational layer where firmware and abstraction become system behavior. It is concerned less with static structure than with sequencing and authority: who can configure a peripheral, when state transitions occur, how hardware events are surfaced to software, and how concurrent access is controlled.
In simple systems, device control may be direct and local. One module configures a UART, polls for bytes, and exposes a small transmit/receive interface. In more complex systems, device control may be mediated through drivers, kernel services, device trees, power managers, and subsystem APIs. What matters architecturally is not how many layers are present, but whether the system has a clear control path.
Device control becomes fragile when ownership is ambiguous, when peripheral state can be mutated from multiple contexts without discipline, or when power and initialization dependencies are scattered across the codebase. It also becomes fragile when higher layers believe a device is ready, while the lower layer has not completed initialization, resumed from sleep, recovered from a bus fault, or validated retained state.
Strong device control makes hardware use explicit and bounded. It defines valid operations, valid states, allowed callers, timing assumptions, and error behavior. It also makes unsupported operations visible rather than allowing undefined behavior to spread quietly through the system.
From Registers to Application Logic
Embedded software often spans several layers between hardware and application behavior. At the bottom are memory-mapped registers, interrupt vectors, reset handlers, linker-defined memory regions, and timing primitives. Above that come startup code, board support packages, and device-specific headers. Higher still sit HALs, drivers, middleware, RTOS services, or kernel device models. At the top, application logic interacts with devices through service-level interfaces rather than register-level operations.
This stack is useful because it separates concerns. But in embedded systems, those layers remain tightly coupled. Application timing depends on driver behavior. Driver behavior depends on register semantics and interrupt structure. Power management depends on both. Unlike in many enterprise software environments, low-level realities do not disappear because they are wrapped in APIs. They remain active constraints on the whole design.
That is why the most effective embedded architectures are not those that pretend hardware no longer matters. They are those that choose carefully where direct hardware knowledge must remain visible and where abstraction genuinely improves control, portability, or maintainability.
A strong stack also supports testing at multiple levels. Register-level code can be reviewed against datasheets. Drivers can be tested against simulated or real devices. Application-facing interfaces can be validated against contracts. Hardware-in-the-loop tests can verify that the stack works under timing, power, and fault conditions that unit tests alone cannot capture.
Drivers, Device Models, and Interface Contracts
Device drivers are the most visible form of device control. A driver translates between a hardware component’s registers, timing requirements, and state machine on one side, and a software-facing interface on the other. Drivers do not merely issue commands. They establish the terms on which hardware can be used.
In mature embedded systems, a driver should define clear interface contracts. These include what initialization is required, whether calls may block, which calls are safe in interrupt context, what errors can occur, how timeouts are handled, whether operations are synchronous or asynchronous, how concurrent access is serialized, and what happens across suspend and resume.
Driver contracts are especially important when devices sit behind shared buses. A poorly specified I2C, SPI, UART, GPIO, ADC, DMA, storage, or radio driver can create failures that appear elsewhere. One module may assume exclusive access. Another may change bus speed. A third may enter low power while an operation is still pending. Without disciplined contracts, device control becomes a source of race conditions and hidden coupling.
A device model adds structure by organizing configured device instances, immutable configuration data, mutable runtime state, dependency relationships, initialization order, and lifecycle transitions. This helps make device behavior inspectable and reduces the temptation to scatter hardware assumptions across unrelated modules.
Interrupts, Polling, Deferred Work, and Event-Driven Control
Device control often hinges on the choice between polling, interrupt-driven handling, deferred work, and event-driven processing. Polling can be simple and transparent in small systems, but it wastes cycles and can miss timing-sensitive events when scaled poorly. Interrupts provide immediacy, but they also introduce concurrency, shared-state hazards, priority interactions, and latency sensitivity. Deferred work moves heavier processing out of interrupt context while preserving responsiveness.
Embedded architectures rarely commit absolutely to only one of these models. Instead, they combine them according to device behavior. A peripheral may be initialized synchronously, serviced by interrupts for urgent events, and exposed to higher layers through asynchronous queues, callbacks, or event flags. A sensor may use polling during startup but interrupts during normal operation. A radio may use interrupt-driven packet events but deferred work for parsing and transmission policy.
The control question is not which method is theoretically best. It is how urgent hardware events should be transformed into manageable software work without making timing, ownership, or state ambiguous.
A disciplined design defines what may happen in interrupt context, what must be deferred, how shared state is protected, which events may be dropped or coalesced, and how higher layers are notified. Without that discipline, interrupts become a hidden second execution model that can corrupt state, starve tasks, or break power-management assumptions.
Power States, Initialization, Suspend/Resume, and Lifecycle Control
Device control is not limited to active operation. It also includes the transitions by which devices enter and exit useful states: power-up, initialization, configuration, suspend, resume, reset, fault recovery, low-power entry, and update. In many embedded systems, these transitions are where failure is most likely to occur.
A peripheral may behave correctly once configured but fail during resume. A radio may work under nominal conditions but deadlock across power-state changes. A sensor may require precise sequencing after reset. A storage device may tolerate ordinary reads but fail after brownout if state validation is weak. A bus may recover from timeout only if the driver explicitly resets both controller and device-side assumptions.
Power management makes lifecycle control especially important. Drivers must know whether a device can be suspended, what state must be saved, what must be restored, which wake sources remain active, and whether higher layers may call into the device while it is suspended. Runtime power management requires drivers, subsystems, and applications to cooperate rather than treating power as a local detail.
Strong embedded firmware therefore treats lifecycle control as part of device architecture. It plans for suspend and resume, for runtime power management, for reset causes, for partial failures, and for recovery from interrupted operations. This is especially important in field devices expected to remain operational for long periods under non-ideal conditions.
State Ownership, Concurrency, and Resource Arbitration
Hardware resources are often shared. A bus may serve multiple devices. A timer may support both scheduling and measurement. A DMA engine may be requested by several subsystems. A GPIO pin may be repurposed across board revisions. A power rail may supply multiple sensors. The firmware architecture must therefore define not only how hardware is accessed, but who has authority to access it.
State ownership is central. If multiple modules can mutate peripheral state directly, the system becomes difficult to reason about. One module may change a clock divider while another assumes stable timing. One task may reconfigure an interrupt while another waits on an event. One driver may suspend a shared bus while another device still depends on it. These are not merely coding issues. They are architectural failures of ownership.
Concurrency deepens the problem. Interrupts, RTOS tasks, callbacks, DMA completion handlers, and low-power transitions may all interact with the same device state. A strong firmware architecture identifies which state is shared, which contexts may access it, which locks or atomic operations are required, and which operations must be serialized.
Resource arbitration should be explicit rather than accidental. Good firmware defines who owns a peripheral, which calls are allowed from which contexts, and how conflicts are resolved. That discipline is what allows the rest of the embedded system to rely on device behavior rather than reverse-engineer it from side effects.
Testing, Simulation, and Hardware-in-the-Loop Validation
Firmware and device-control code are difficult to validate because much of their behavior depends on hardware timing, interrupts, bus states, power transitions, and physical devices. Unit tests are useful but insufficient. A robust validation strategy combines static analysis, unit tests, interface-contract tests, simulated device tests, integration tests, power-transition tests, and hardware-in-the-loop tests.
Simulation can help test driver state machines, timeout handling, interface contracts, and error paths before hardware is available. Mock devices can expose whether the driver handles invalid states, delayed responses, CRC failures, or bus timeouts. Python and R workflows can summarize failure patterns, timing behavior, or fleet diagnostics. But real hardware remains necessary for validating register semantics, signal timing, power sequencing, interrupt behavior, and physical recovery.
Hardware-in-the-loop testing should include negative cases. What happens if a device does not acknowledge? What if an interrupt arrives during suspend? What if power drops during a write? What if a bus remains stuck? What if a sensor returns stale data? What if a driver is called before initialization? What if the device resumes from sleep with partial state loss?
A mature firmware test plan does not only prove that the happy path works. It proves that the control layer behaves predictably when hardware behaves imperfectly.
Security, Updateability, and Firmware Integrity
Firmware is a trust boundary. It defines how hardware is initialized, how privileged registers are configured, how boot proceeds, how updates are accepted, and how the device recovers from abnormal states. Weak firmware integrity can compromise the whole embedded system even when application code appears correct.
Security concerns include secure boot, firmware signing, rollback protection, update atomicity, debug-port control, key storage, memory protection, peripheral access restrictions, and trusted recovery behavior. Not every embedded device needs the same security architecture, but every firmware design should be clear about its assumptions. A field device, infrastructure controller, medical-adjacent device, or gateway exposed to networks has a very different risk profile from a short-lived lab prototype.
Updateability is especially important. Firmware updates can fix field defects, improve device behavior, and extend system life. But they can also brick devices, break driver assumptions, corrupt persistent state, or create incompatible hardware behavior if the update process is poorly designed. A strong update architecture includes manifests, compatibility checks, rollback paths, interrupted-update recovery, and diagnostic evidence.
Firmware integrity should therefore be treated as part of device control. The system must know not only how to operate hardware, but how to preserve the trustworthiness of the code that controls that hardware.
Firmware Observability and Diagnostic Evidence
Firmware cannot be improved if field failures leave no evidence. Embedded devices should preserve enough diagnostic information to explain initialization failures, device errors, bus timeouts, power-state transitions, reset causes, firmware versions, configuration versions, board revisions, update outcomes, and recovery results.
Useful firmware observability signals include reset cause, boot count, firmware version, board revision, initialization status, driver error counters, bus timeout counts, interrupt counts, queue overflows, watchdog resets, brownout events, suspend/resume failures, unexpected wakeups, power-state residency, update results, and rollback state. These signals should not be afterthoughts. They are the evidence base for maintenance and reliability improvement.
Observability also changes development culture. A system that merely resets may appear to recover. A system that records repeated reset causes, driver errors, failed suspend/resume attempts, and update failures reveals whether recovery is masking unresolved defects. Diagnostic evidence turns hidden fragility into actionable engineering information.
A mature firmware layer therefore makes itself visible. It does not only control hardware. It reports how that control is working in the field.
Mathematical Lens: Latency, Overhead, Control Coverage, and Interface Cost
A mathematical lens helps connect firmware architecture to measurable system behavior. Let \(L_{\mathrm{path}}\) be end-to-end control-path latency, \(O_{\mathrm{abs}}\) abstraction overhead, \(C_{\mathrm{state}}\) state coverage across device states, \(D_{\mathrm{err}}\) detected driver errors, and \(D_{\mathrm{total}}\) total driver faults observed or injected during validation.
L_{\mathrm{path}} = L_{\mathrm{api}} + L_{\mathrm{driver}} + L_{\mathrm{bus}} + L_{\mathrm{device}} + L_{\mathrm{isr}}
\]
Interpretation: Device-control latency includes software API overhead, driver logic, bus transaction time, physical device response, and interrupt latency. Abstraction is acceptable only when timing-sensitive paths remain within budget.
O_{\mathrm{abs}} = \frac{L_{\mathrm{abstracted}} – L_{\mathrm{direct}}}{L_{\mathrm{direct}}}
\]
Interpretation: Abstraction overhead compares abstracted access with direct access. Some overhead may be worth the gain in portability, testability, and maintainability, but it should be known rather than assumed.
C_{\mathrm{state}} = \frac{N_{\mathrm{tested\ states}}}{N_{\mathrm{required\ states}}}
\]
Interpretation: State coverage measures whether required device states—init, active, idle, suspend, resume, fault, reset, and recovery—are actually tested.
C_{\mathrm{detect}} = \frac{D_{\mathrm{err}}}{D_{\mathrm{total}}}
\]
Interpretation: Detection coverage estimates how many injected or observed device-control faults are detected by diagnostics, assertions, timeouts, or telemetry.
R_{\mathrm{port}} = \frac{N_{\mathrm{portable\ modules}}}{N_{\mathrm{total\ modules}}}
\]
Interpretation: Portability ratio measures how much of the codebase can move across hardware variants without direct modification. It is useful only when timing and hardware-specific requirements remain visible where necessary.
These equations do not replace engineering judgment. Their value is to make abstraction, control latency, coverage, and portability measurable enough to review rather than treating them as vague design preferences.
Python Workflow: Driver State, Timing, and Fault-Path Simulation
The companion Python workflow models firmware device control as a state machine with initialization, configuration, active operation, interrupt service, deferred work, suspend, resume, fault, reset, update, and recovery states. It can simulate driver timing, bus timeouts, interrupt latency, power-state transitions, fault-injection coverage, update compatibility checks, and diagnostic evidence.
The workflow is designed to answer practical engineering questions. Which states are reachable? Which transitions are untested? How much latency does the abstraction path add? What happens when a bus transaction fails? Which driver errors are detected? Does the resume path restore valid state? Do repeated timeouts trigger reset or degraded behavior? Which devices produce the most diagnostic events?
Useful outputs include driver state-transition tables, latency-budget summaries, fault-injection coverage, suspend/resume validation reports, update-compatibility checks, and plots of control-path latency across device classes. In a production setting, this workflow could support firmware architecture review, driver regression testing, and hardware-in-the-loop planning.
The purpose is not to replace real hardware testing. It is to make the control model explicit so that firmware behavior can be reviewed before it becomes a hidden field failure.
R Workflow: Firmware Telemetry and Driver Reliability Reporting
The companion R workflow treats firmware behavior as a fleet-observability problem. It summarizes reset causes, boot failures, driver initialization errors, bus timeouts, interrupt counts, suspend/resume failures, power-state residency, firmware versions, hardware revisions, and update outcomes across deployed devices.
This matters because firmware problems often appear at fleet scale. One firmware version may increase bus timeouts. One board revision may show more resume failures. One sensor driver may fail only after repeated suspend cycles. One gateway class may show higher interrupt load. Fleet reporting helps distinguish isolated hardware defects from systemic firmware-control weaknesses.
Useful R outputs include driver-error rankings, reset-cause distributions, firmware-version comparisons, suspend/resume failure rates, update success rates, interrupt-load summaries, and device-control risk tables. These reports support maintenance, firmware rollback, driver redesign, and release governance.
A mature firmware system is not only written and flashed. It is observed across its operating life.
Systems Code: HAL Contracts, Device State Machines, Rust Validation, Go Telemetry, PYNQ, HDL, and Bash
The companion systems stack demonstrates how firmware, HAL, and device-control concerns appear across implementation layers.
The C example focuses on firmware-adjacent device-control contracts: initialization state, error codes, blocking behavior, ISR-safe flags, timeout behavior, and suspend/resume readiness. The C++ example models a device lifecycle state machine with reset, init, configured, active, suspended, fault, recovery, update, rollback, and disabled states. The Rust example validates driver manifests and ensures that required fields—device name, bus, interrupts, power states, ownership, API contract, and error behavior—are present before deployment. The Go example sketches a firmware telemetry aggregator for reset causes, driver errors, update outcomes, and device-state evidence.
MicroPython provides a prototype for simple device initialization, sensor readout, and low-power suspend/resume behavior on constrained boards. TinyML can support local event screening or anomaly detection where appropriate, but it should not replace explicit device-control contracts. PYNQ support can demonstrate hardware-assisted register access, event counting, timestamping, or interrupt tracing. HDL examples can model peripheral-enable gates, interrupt counters, or device-state indicators.
The Bash scripts tie the workflow together by validating manifests, running Python and R workflows, generating outputs, and checking repository structure. The goal is not to turn the article into a full firmware framework. The goal is to provide an engineering scaffold that mirrors real firmware problems: state, timing, power, abstraction, diagnostics, updateability, and hardware control.
Technical Verification Gates
Firmware, HAL, and device-control designs should pass explicit verification gates before deployment and during operation. These gates prevent the design from being judged only by whether the device works under nominal conditions.
| Gate | Verification Question | Evidence Required |
|---|---|---|
| Ownership gate | Is each hardware resource owned by a defined layer or driver? | Resource ownership map, register access policy, code review record |
| Initialization gate | Does reset and startup sequencing configure clocks, memory, pins, buses, devices, and diagnostics correctly? | Boot trace, initialization test, reset-cause log |
| Interface-contract gate | Are blocking behavior, ISR safety, errors, timeouts, and power assumptions documented? | Driver contract, API documentation, integration test |
| Timing gate | Are control-path latency and interrupt behavior within required budgets? | Latency measurement, interrupt-load test, timing report |
| Power-state gate | Do suspend, resume, runtime PM, and wake behavior preserve valid device state? | Suspend/resume test, power-state telemetry, dependency audit |
| Fault-path gate | Are bus failures, device timeouts, invalid states, and initialization errors detected and handled? | Fault-injection test, diagnostic log, recovery validation |
| Update gate | Can firmware update, rollback, and compatibility checks protect hardware-control assumptions? | Update manifest, rollback test, version-compatibility report |
| Field-evidence gate | Can deployed devices report reset causes, driver errors, power-state failures, update outcomes, and firmware versions? | Telemetry schema, fleet report, maintenance threshold |
These gates reinforce the central principle: firmware architecture is not validated by successful nominal operation alone. It is validated when initialization, control, timing, power-state transitions, fault paths, update paths, and diagnostic evidence are all testable.
Common Failure Modes
Firmware and device-control failures often masquerade as hardware problems, application bugs, or random field instability. A sensor may appear unreliable because its driver resumes incorrectly. A radio may appear defective because a power rail is sequenced improperly. An application may appear unstable because a lower-level driver blocks unexpectedly or mutates shared state from interrupt context.
Common failure modes include abstraction layers that hide critical timing or state assumptions, drivers that expose incomplete interface contracts, firmware that centralizes too much hardware knowledge in one fragile module, multiple layers competing for control over the same peripheral, power-state transitions that are not coordinated with subsystem expectations, and portability layers that erase useful hardware distinctions.
Other failures include unbounded polling, missing timeouts, interrupt handlers that do too much work, shared bus access without arbitration, reset handlers that discard diagnostic evidence, suspend/resume paths that are rarely tested, firmware updates that break board assumptions, and low-level APIs that return ambiguous error information.
A particularly important failure mode is false portability. The code appears portable because it compiles across boards, but timing, power, interrupt, or peripheral assumptions remain silently board-specific. Strong firmware architecture distinguishes true portability from accidental build compatibility.
Abstraction Trade-Offs and Design Tensions
The central trade-off in this domain is between control and indirection. Too little abstraction can make systems tightly optimized but brittle, device-specific, and difficult to evolve. Too much abstraction can make systems portable in theory but opaque in timing, memory use, power behavior, and failure semantics.
A good firmware design chooses abstraction boundaries based on system needs. Safety-critical timing paths may require more direct visibility. Commodity bus access may benefit from a stable API. Board-specific initialization may belong in a board support layer. Application logic should usually avoid direct register manipulation. Driver internals may need hardware-specific knowledge, while driver contracts should remain stable and explicit.
This is why hardware abstraction is not a generic software virtue. It is an engineering decision about where to place complexity. The goal is not maximum abstraction. The goal is the right abstraction: enough to support portability and maintainability, not so much that the device becomes difficult to reason about.
The strongest embedded architectures preserve both clarity and control. They expose enough hardware reality for engineers to meet timing, power, and reliability requirements while preventing every higher-level module from becoming dependent on register-level details.
Applications in Embedded and Edge Systems
Firmware and device-control design appear across nearly every embedded domain: environmental sensing, industrial automation, robotics, smart infrastructure, wearables, communications devices, automotive subsystems, medical-adjacent devices, energy systems, and edge gateways. In smaller devices, this layer may remain close to bare-metal control. In larger products, it may sit inside an RTOS or an embedded operating framework with formal device models and subsystem services.
This layer is especially important in embedded and edge systems because it mediates between physical resources and higher-order behavior. Sensors, buses, radios, storage, and actuators do not become system capabilities until firmware and drivers make them controllable. In that sense, firmware and hardware abstraction are what transform hardware presence into device function.
The same logic applies to low-power systems, environmental sensor networks, cyber-physical systems, and intelligent infrastructure. Field devices must not only sense and communicate. They must initialize reliably, recover from faults, conserve power, preserve state, expose diagnostics, and make hardware behavior governable over time.
Engineer Checklist
| Question | Why It Matters |
|---|---|
| Is each hardware resource owned by a clear firmware layer or driver? | Prevents conflicting access, hidden side effects, and scattered register manipulation. |
| Are initialization and reset paths explicitly tested? | Ensures clocks, memory, interrupts, buses, devices, and diagnostics start from known state. |
| Are driver APIs explicit about blocking behavior, interrupt safety, errors, timeouts, and power assumptions? | Prevents higher layers from relying on ambiguous or accidental behavior. |
| Are suspend and resume paths treated as first-class execution paths? | Protects low-power operation, wake behavior, and retained-state validity. |
| Are bus timeouts, device faults, invalid states, and initialization failures detected? | Prevents low-level failures from silently propagating into application behavior. |
| Does the abstraction boundary preserve timing, power, and hardware-specific constraints? | Prevents abstraction from hiding the realities that determine embedded correctness. |
| Can firmware updates preserve compatibility with hardware-control assumptions? | Protects field devices from update-induced control failures. |
| Does firmware produce diagnostic evidence in the field? | Supports root-cause analysis, maintenance, rollback, and reliability improvement. |
GitHub Repository
This article is supported by a companion workflow that treats firmware, hardware abstraction, and device control as a structured embedded-control architecture: driver contracts, device-state machines, register access policy, interrupt handling, suspend/resume behavior, diagnostic telemetry, Python state simulation, R fleet reporting, SQL evidence schemas, systems-code examples, tests, manifests, and runbooks.
The companion repository includes Python, R, SQL, C, C++, Rust, Go, MicroPython, TinyML, PYNQ, HDL, Bash, YAML/JSON configuration, notebooks, tests, docs, data, outputs, and article-specific engineering workflows.
Where This Fits in the Series
This article extends the foundation established in Embedded Systems Architecture, Microcontrollers and System-on-Chip Design, and Real-Time Operating Systems in Embedded Computing by focusing on how hardware is made operable in practice.
It prepares the way for later work on Data Acquisition and Embedded Sensor Interfaces, Low-Power Embedded System Design, Reliability and Fault Tolerance in Embedded Devices, Environmental Sensor Networks, cyber-physical systems, and edge computing architectures.
Related articles
- Embedded Systems Architecture
- Microcontrollers and System-on-Chip Design
- Real-Time Operating Systems in Embedded Computing
- Data Acquisition and Embedded Sensor Interfaces
- Low-Power Embedded System Design
- Reliability and Fault Tolerance in Embedded Devices
Further reading
- Arm (n.d.) CMSIS-Core documentation. Available at: https://arm-software.github.io/CMSIS_6/latest/Core/index.html.
- Arm (n.d.) CMSIS overview. Available at: https://arm-software.github.io/CMSIS_6/.
- Lee, E.A. and Seshia, S.A. (2017) Introduction to Embedded Systems: A Cyber-Physical Systems Approach. 2nd edn. Cambridge, MA: MIT Press.
- Wolf, W. (2012) Computers as Components: Principles of Embedded Computing System Design. 3rd edn. Burlington, MA: Morgan Kaufmann.
- Yiu, J. (2015) The Definitive Guide to ARM Cortex-M3 and Cortex-M4 Processors. 3rd edn. Oxford: Newnes.
- Zephyr Project (n.d.) Device Driver Model. Available at: https://docs.zephyrproject.org/latest/kernel/drivers/index.html.
- Zephyr Project (n.d.) Device Power Management. Available at: https://docs.zephyrproject.org/latest/services/pm/device.html.
References
- Arm (n.d.) CMSIS-Core documentation. Available at: https://arm-software.github.io/CMSIS_6/latest/Core/index.html.
- Arm (n.d.) CMSIS overview. Available at: https://arm-software.github.io/CMSIS_6/.
- Arm (n.d.) Cortex-M4 product support. Available at: https://developer.arm.com/Processors/Cortex-M4.
- Lee, E.A. and Seshia, S.A. (2017) Introduction to Embedded Systems: A Cyber-Physical Systems Approach. 2nd edn. Cambridge, MA: MIT Press.
- Wolf, W. (2012) Computers as Components: Principles of Embedded Computing System Design. 3rd edn. Burlington, MA: Morgan Kaufmann.
- Yiu, J. (2015) The Definitive Guide to ARM Cortex-M3 and Cortex-M4 Processors. 3rd edn. Oxford: Newnes.
- Zephyr Project (n.d.) Device Driver Model. Available at: https://docs.zephyrproject.org/latest/kernel/drivers/index.html.
- Zephyr Project (n.d.) Device Power Management. Available at: https://docs.zephyrproject.org/latest/services/pm/device.html.
- Zephyr Project (n.d.) Introduction. Available at: https://docs.zephyrproject.org/latest/introduction/index.html.